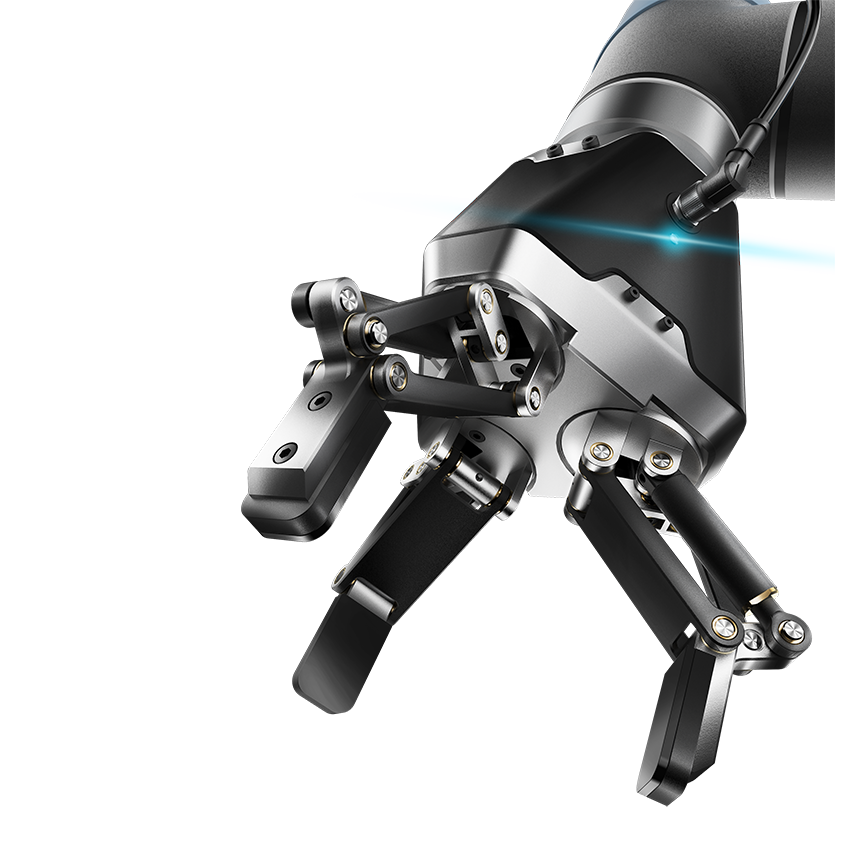
DH ROBOTICS SERVO ELECTRIC GRIPPER AG SERIES – DH-3 อุปกรณ์จับยึดแบบปรับได้ด้วยไฟฟ้า



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ซีรีส์ AG เป็นตัวจับยึดไฟฟ้าแบบปรับได้ชนิดเชื่อมต่อ ซึ่งได้รับการพัฒนาขึ้นโดย DH-Robotics อย่างอิสระ ด้วยซอฟต์แวร์แบบ Plug& Play และการออกแบบโครงสร้างที่ประณีต ซีรีส์ AG จึงเป็นโซลูชันที่สมบูรณ์แบบสำหรับการใช้งานร่วมกับหุ่นยนต์ร่วมปฏิบัติงาน (Collaborative Robots) เพื่อจับยึดชิ้นงานที่มีรูปทรงแตกต่างกันในอุตสาหกรรมต่างๆ
คุณสมบัติ
✔ การออกแบบแบบบูรณาการ
✔ พารามิเตอร์ที่ปรับได้
✔ ฟังก์ชันล็อคอัตโนมัติ
✔ สามารถเปลี่ยนปลายนิ้วได้
✔ IP67
✔ คำติชมอัจฉริยะ
✔ เรดด์
✔ การรับรองจาก FCC
✔ ได้รับการรับรองมาตรฐาน RoHS
ระดับการป้องกันสูง
ผลิตภัณฑ์ซีรี่ส์ PGC มีระดับการป้องกันสูงถึง IP67 ดังนั้นจึงสามารถทำงานได้ในสภาวะที่รุนแรง เช่น สภาพแวดล้อมการดูแลเครื่องจักร
เสียบปลั๊กแล้วใช้งานได้เลย
ซีรีส์ PGC รองรับการใช้งานร่วมกับหุ่นยนต์ร่วมปฏิบัติงานส่วนใหญ่ในตลาดแบบเสียบปลั๊กและใช้งานได้ทันที ทำให้ควบคุมและตั้งโปรแกรมได้ง่ายขึ้น
โหลดสูง
แรงยึดจับของซีรีส์ PGC สามารถสูงถึง 300 นิวตัน และรับน้ำหนักได้สูงสุด 6 กิโลกรัม ซึ่งสามารถตอบสนองความต้องการในการยึดจับที่หลากหลายยิ่งขึ้น



พารามิเตอร์ข้อมูลจำเพาะ
| เอจี-160-95 | เอจี-105-145 | ดีเอช-3 | ||||
| แรงยึดจับ (ต่อขากรรไกร) | 45~160 N | 35~105 N | 10~65 N | |||
| จังหวะ | 95 มม. | 145 มม. | 106 มม. (ขนาน) 122 มม. (จุดศูนย์กลาง) | |||
| น้ำหนักชิ้นงานที่แนะนำ | 3 กก. | 2 กก. | 1.8 กก. | |||
| เวลาเปิด/ปิดทำการ | 0.9 วินาที/0.9 วินาที | 0.9 วินาที/0.9 วินาที | 0.7 วินาที/0.7 วินาที | |||
| ความแม่นยำในการทำซ้ำ (ตำแหน่ง) | ± 0.03 มม. | ± 0.03 มม. | ± 0.03 มม. | |||
| การปล่อยเสียงรบกวน | น้อยกว่า 60 เดซิเบล | น้อยกว่า 60 เดซิเบล | น้อยกว่า 60 เดซิเบล | |||
| น้ำหนัก | 1 กก. | 1.3 กก. | 1.68 กก. | |||
| วิธีการขับขี่ | น็อตเกลียว + กลไกเชื่อมต่อ | น็อตเกลียว + กลไกเชื่อมต่อ | ระบบขับเคลื่อนด้วยเฟือง + น็อตสกรู + กลไกเชื่อมต่อ | |||
| ขนาด | 184.6 มม. x 162.3 มม. x 67 มม. | 203.9 มม. x 212.3 มม. x 67 มม. | 213.5 มม. x 170 มม. x 118 มม. | |||
| อินเทอร์เฟซการสื่อสาร | มาตรฐาน: Modbus RTU (RS485), อินพุต/เอาต์พุตดิจิทัล ตัวเลือกเพิ่มเติม: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT | มาตรฐาน: โมดูลการสื่อสาร TCP/IP (รวมถึง TCP/IP, USB2.0, CAN2.0A) ตัวเลือกเสริม: EtherCAT | ||||
| แรงดันไฟฟ้าที่กำหนด | 24 โวลต์ DC ± 10% | 24 โวลต์ DC ± 10% | 24 โวลต์ DC ± 10% | |||
| กระแสไฟฟ้าที่กำหนด | 0.8 เอ | 0.8 เอ | 0.5 เอ | |||
| กระแสสูงสุด | 1.5 เอ | 1.5 เอ | 1 เอ | |||
| คลาส IP | ไอพี 54 | ไอพี 54 | IP 40 | |||
| สภาพแวดล้อมที่แนะนำ | 0-40°C, ความชื้นสัมพัทธ์ 85% | |||||
| การรับรอง | CE, FCC, RoHS | |||||
ธุรกิจของเรา







