เครื่องจัดเรียงพาเลทแบบหุ่นยนต์อัตโนมัติเต็มรูปแบบพร้อมแขนหุ่นยนต์


เครื่องจัดเรียงพาเลทแบบหุ่นยนต์อัตโนมัติเต็มรูปแบบพร้อมแขนหุ่นยนต์
หมวดหมู่หลัก
AGV AMR / รถยก AGV AMR / รถนำทางอัตโนมัติ AGV / หุ่นยนต์เคลื่อนที่อัตโนมัติ AMR / รถ AGV AMR สำหรับการขนถ่ายวัสดุในอุตสาหกรรม / ผู้ผลิตหุ่นยนต์ AGV จากประเทศจีน / คลังสินค้า AMR / รถยก AMR พร้อมระบบนำทางเลเซอร์ SLAM / หุ่นยนต์เคลื่อนที่ AGV AMR / แชสซี AGV AMR พร้อมระบบนำทางเลเซอร์ SLAM / หุ่นยนต์โลจิสติกส์อัจฉริยะ
ขอแนะนำแขนหุ่นยนต์สำหรับจัดเรียงสินค้าลงพาเลท บรรจุถุง และบรรจุกล่องในระดับอุตสาหกรรม ซึ่งเป็นนวัตกรรมใหม่ที่จะปฏิวัติกระบวนการบรรจุและขนย้ายสินค้าในอุตสาหกรรม แขนหุ่นยนต์ล้ำสมัยนี้ได้รับการออกแบบมาเพื่อเพิ่มประสิทธิภาพและผลผลิตสูงสุด พร้อมทั้งรับประกันการจัดการถุง กล่อง และบรรจุภัณฑ์อย่างปลอดภัยและมั่นคง
เนื่องจากความต้องการความเร็วและความแม่นยำในการผลิตและโลจิสติกส์ยังคงเพิ่มขึ้นอย่างต่อเนื่อง แขนหุ่นยนต์สำหรับงานจัดเรียงสินค้าบนพาเลท การซ้อนสินค้า การบรรจุถุงและกล่อง จึงเป็นคำตอบที่ดีที่สุด หมดปัญหาเรื่องการใช้แรงงานคนและความเสี่ยงจากความผิดพลาดของมนุษย์ แขนหุ่นยนต์ขั้นสูงนี้ได้รับการตั้งโปรแกรมให้จัดเรียงสินค้าบนพาเลท ซ้อนสินค้า และจัดการถุง กล่อง และบรรจุภัณฑ์ทุกประเภทได้อย่างง่ายดาย ทำให้การดำเนินงานราบรื่นและลดเวลาหยุดทำงานให้น้อยที่สุด
แขนหุ่นยนต์สำหรับงานอุตสาหกรรม การจัดเรียงสินค้าบนพาเลท การซ้อนสินค้า และการบรรจุถุงและกล่อง มีคุณสมบัติที่เหนือกว่าวิธีการแบบดั้งเดิมอย่างไม่มีใครเทียบได้ แขนหุ่นยนต์นี้ติดตั้งเซ็นเซอร์และเทคโนโลยีที่ทันสมัยเพื่อให้การเคลื่อนไหวแม่นยำและสม่ำเสมอ ลดโอกาสการทำงานผิดพลาดหรือความเสียหายต่อผลิตภัณฑ์ที่กำลังจัดการ ความสามารถในการทำงานด้วยความเร็วสูง ผสานกับความสามารถในการตรวจจับและปรับรูปทรงและขนาดต่างๆ ได้อย่างแม่นยำ ช่วยเพิ่มความเร็วและประสิทธิภาพของงานบรรจุภัณฑ์ได้อย่างมาก
นอกจากนี้ แขนหุ่นยนต์นี้ยังมีความอเนกประสงค์อย่างเหลือเชื่อ ทำให้เหมาะสำหรับอุตสาหกรรมหลากหลายประเภท ตั้งแต่การแปรรูปอาหารไปจนถึงเภสัชกรรม คลังสินค้าไปจนถึงการผลิต โซลูชันหุ่นยนต์นี้สามารถปรับตัวให้เข้ากับสภาพแวดล้อมและงานต่างๆ ได้อย่างราบรื่น ไม่ว่าจะเป็นการจัดการถุงที่มีน้ำหนักต่างกัน การเรียงกล่องอย่างแม่นยำ หรือการบรรจุผลิตภัณฑ์อย่างระมัดระวัง แขนหุ่นยนต์สำหรับงานจัดเรียงพาเลท เรียงซ้อน และบรรจุกล่องในระดับอุตสาหกรรมของเราคือโซลูชันที่สมบูรณ์แบบ
โดยสรุปแล้ว แขนหุ่นยนต์สำหรับบรรจุถุงและกล่องลงพาเลทในอุตสาหกรรมนี้เป็นตัวเปลี่ยนเกมในโลกของการบรรจุและขนย้ายสินค้าในอุตสาหกรรม ด้วยคุณสมบัติขั้นสูง ประสิทธิภาพที่เหนือกว่า และความอเนกประสงค์ โซลูชันปฏิวัติวงการนี้จะปรับเปลี่ยนอุตสาหกรรมโดยการเพิ่มผลผลิต ลดต้นทุนแรงงาน และรับประกันความปลอดภัยของผลิตภัณฑ์อย่างมีนัยสำคัญ ก้าวล้ำนำหน้าคู่แข่งและก้าวสู่อนาคตของระบบอัตโนมัติในอุตสาหกรรมด้วยแขนหุ่นยนต์ล้ำสมัยของเรา
แอปพลิเคชัน

แชสซีไร้คนขับซีรีส์ AMB (Auto Mobile Base) สำหรับยานพาหนะนำทางอัตโนมัติ AGV เป็นแชสซีอเนกประสงค์ที่ออกแบบมาสำหรับยานพาหนะนำทางอัตโนมัติ AGV โดยมีคุณสมบัติต่างๆ เช่น การแก้ไขแผนที่และการนำทางระบุตำแหน่ง แชสซีไร้คนขับสำหรับรถเข็น AGV นี้มีอินเทอร์เฟซที่หลากหลาย เช่น I/O และ CAN สำหรับติดตั้งโมดูลด้านบนต่างๆ พร้อมกับซอฟต์แวร์ไคลเอ็นต์และระบบการจัดการที่มีประสิทธิภาพ ช่วยให้ผู้ใช้สามารถผลิตและใช้งานยานพาหนะนำทางอัตโนมัติ AGV ได้อย่างรวดเร็ว มีรูยึดสี่รูที่ด้านบนของแชสซีไร้คนขับซีรีส์ AMB สำหรับยานพาหนะนำทางอัตโนมัติ AGV ซึ่งรองรับการขยายเพิ่มเติมได้ตามต้องการด้วยแม่แรง ลูกกลิ้ง แขนกล ระบบดึงแฝง จอแสดงผล ฯลฯ เพื่อให้ได้การใช้งานที่หลากหลายจากแชสซีเดียว AMB เมื่อใช้ร่วมกับ SEER Enterprise Enhanced Digitalization จะสามารถจัดการและใช้งานผลิตภัณฑ์ AMB หลายร้อยชิ้นพร้อมกันได้อย่างเป็นระบบ ซึ่งช่วยเพิ่มระดับความอัจฉริยะของการขนส่งและโลจิสติกส์ภายในโรงงานได้อย่างมาก
คุณสมบัติ
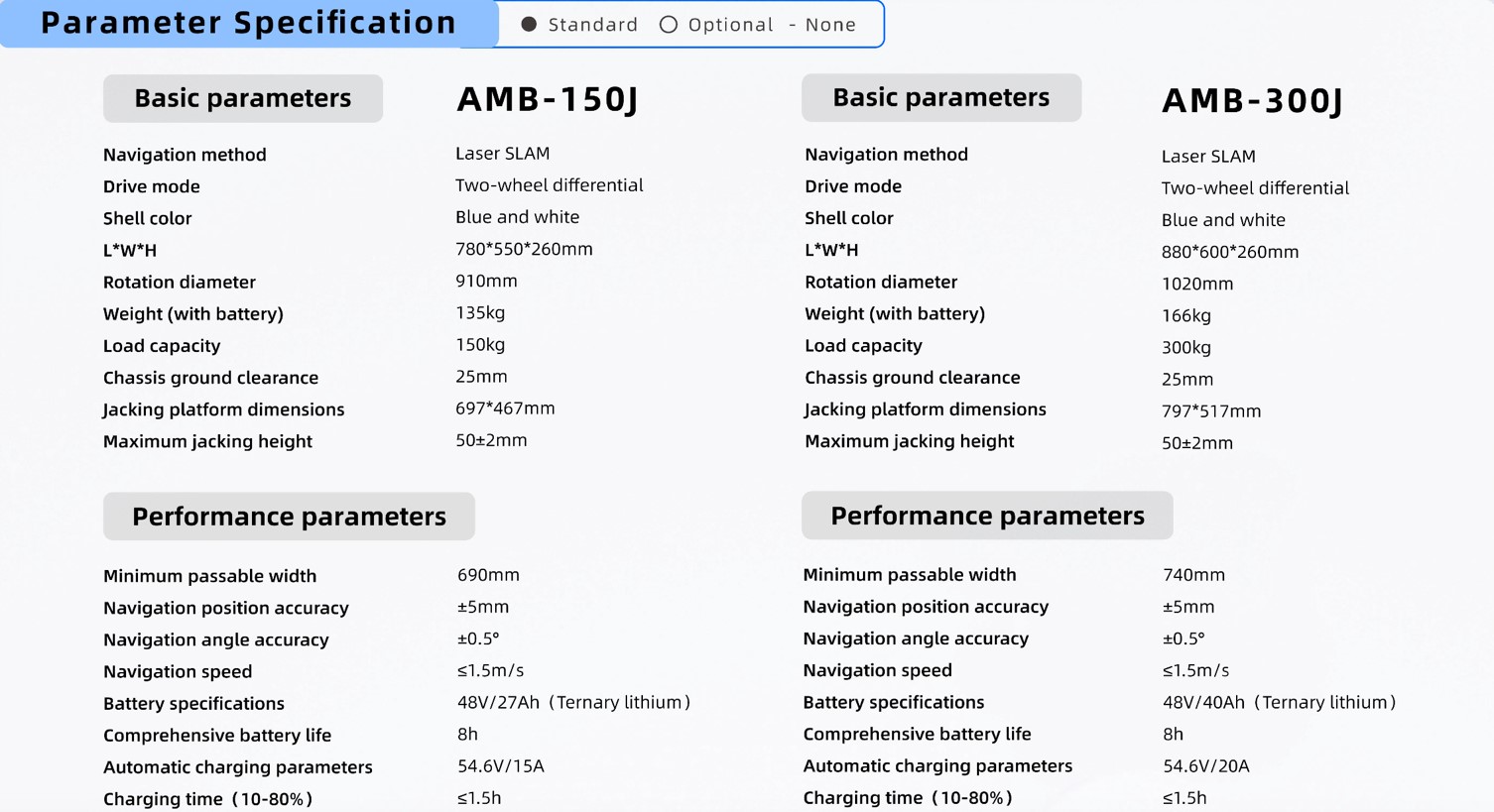
• รับน้ำหนักได้: 150 กก. และ 300 กก.
• ความสูงในการยกสูงสุด: 50 มม.
ความแม่นยำของตำแหน่งนำทาง: ±5 มม.
• ความแม่นยำของมุมนำทาง: ±0.5°
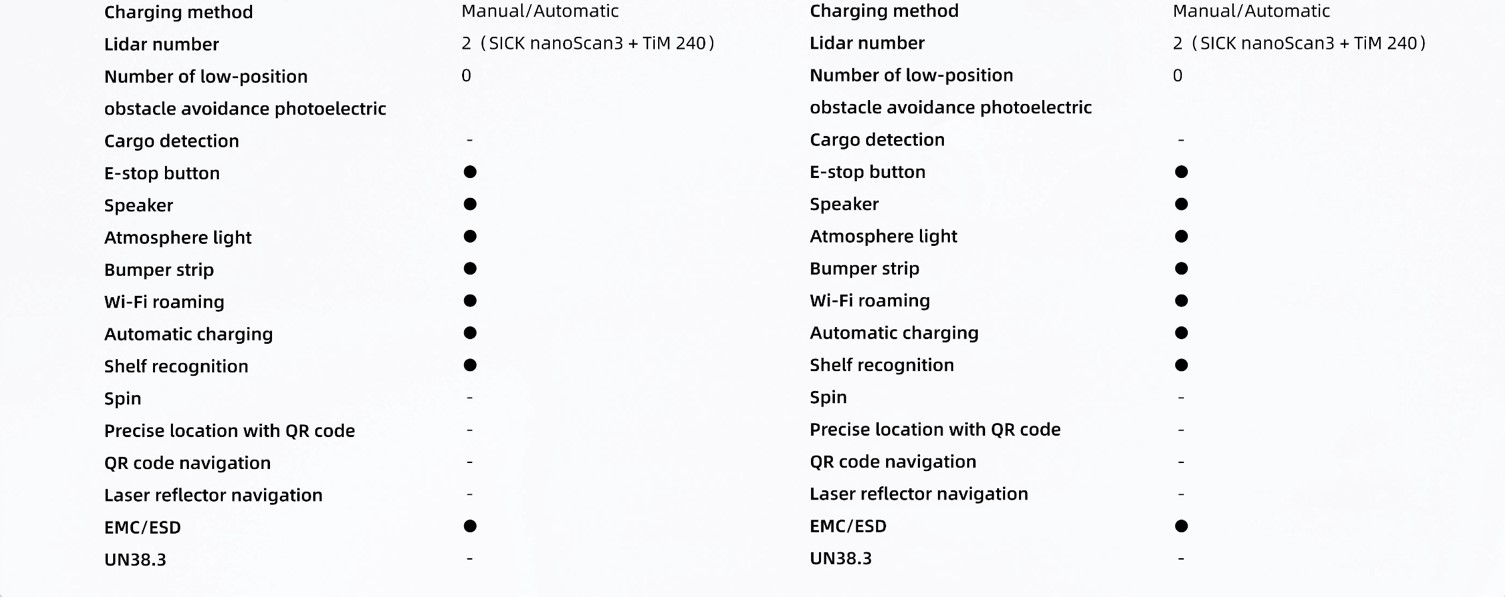
● มีฟีเจอร์มากมายให้ใช้งานได้ตลอดเวลา
คุณสมบัติมาตรฐานที่ครบครันและยอดเยี่ยม รวมถึงคุณสมบัติขั้นสูงที่หลากหลายและใช้งานได้จริง ช่วยให้ลูกค้าสามารถบริหารจัดการระบบโลจิสติกส์อัจฉริยะได้อย่างง่ายดาย
● แพลตฟอร์มหลายสเปคพร้อมสำหรับการขยายระบบ
มีแท่นรับน้ำหนัก 150 กก. และ 300 กก. เพื่อตอบสนองความต้องการด้านน้ำหนักบรรทุกและสภาพแวดล้อมการใช้งานของอุตสาหกรรมต่างๆ นอกจากนี้ยังสามารถใช้งานร่วมกับแขนกล ลูกกลิ้ง แม่แรง ระบบดึงแฝง การหมุน/เอียง จอแสดงผล ฯลฯ เพื่อให้ได้งานใช้งานที่หลากหลายด้วยตัวเครื่องเดียว
● ±5 มม. แม่นยำและมีประสิทธิภาพ
อัลกอริทึม Laser SLAM ถูกนำมาใช้เพื่อให้ได้การระบุตำแหน่งที่มีความแม่นยำสูง โดยความแม่นยำในการระบุตำแหน่งซ้ำโดยไม่สะท้อนแสงของเลเซอร์อยู่ในช่วง ±5 มม. ทำให้การเชื่อมต่อระหว่างหุ่นยนต์เคลื่อนที่และมนุษย์เป็นไปอย่างราบรื่น และการขนส่งสินค้าระหว่างจุดต่างๆ เป็นไปอย่างมีประสิทธิภาพ หมายเหตุ: ค่าจริงขึ้นอยู่กับสภาพแวดล้อม
● ระบบนำทางที่เสถียรเพื่อความปลอดภัยและความน่าเชื่อถือ
ระบบนำทางแบบ Laser SLAM, ระบบนำทางด้วยเลเซอร์รีเฟล็กเตอร์, ระบบนำทางด้วยคิวอาร์โค้ด และวิธีการนำทางอื่นๆ ถูกผสานรวมและสลับใช้งานได้อย่างราบรื่น เพื่อให้มั่นใจได้ถึงการทำงานที่เสถียรของหุ่นยนต์เคลื่อนที่
● ติดตั้งง่ายและจัดการได้อย่างชัดเจน
ชุดซอฟต์แวร์และระบบดิจิทัลที่ครบวงจรช่วยให้การทำงาน การจัดตารางเวลา และการจัดการข้อมูลของหุ่นยนต์เคลื่อนที่ทำได้อย่างง่ายดาย และเชื่อมต่อกับระบบ MES ของโรงงานได้อย่างราบรื่น เพื่อให้เกิดระบบโลจิสติกส์อัจฉริยะอย่างแท้จริง
ผลิตภัณฑ์ที่เกี่ยวข้อง



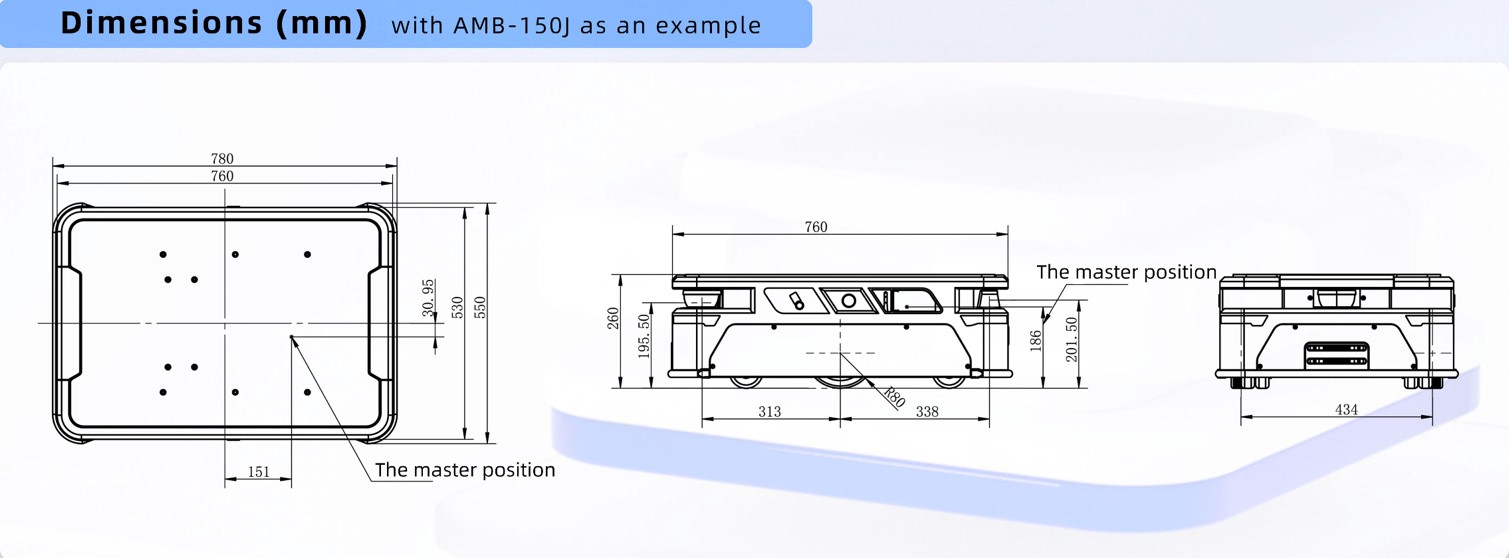
พารามิเตอร์ข้อมูลจำเพาะ
ธุรกิจของเรา







