ชุดเปลี่ยนเร็ว – QCA-05 อุปกรณ์เปลี่ยนเร็วที่ปลายหุ่นยนต์





หมวดหมู่หลัก
ระบบเปลี่ยนเครื่องมือหุ่นยนต์ / ระบบเปลี่ยนเครื่องมือปลายแขน (EOAT) / ระบบเปลี่ยนเร็ว / ระบบเปลี่ยนเครื่องมืออัตโนมัติ / อินเทอร์เฟซเครื่องมือหุ่นยนต์ / ด้านหุ่นยนต์ / ด้านตัวจับยึด / ความยืดหยุ่นของเครื่องมือ / ปลดเร็ว / ระบบเปลี่ยนเครื่องมือแบบใช้ลม / ระบบเปลี่ยนเครื่องมือแบบใช้ไฟฟ้า / ระบบเปลี่ยนเครื่องมือแบบไฮดรอลิก / ระบบเปลี่ยนเครื่องมือความแม่นยำสูง / กลไกการล็อคเพื่อความปลอดภัย / ปลายแขนหุ่นยนต์ / ระบบอัตโนมัติ / ประสิทธิภาพการเปลี่ยนเครื่องมือ / การแลกเปลี่ยนเครื่องมือ / ระบบอัตโนมัติทางอุตสาหกรรม / เครื่องมือปลายแขนหุ่นยนต์ / การออกแบบแบบโมดูลาร์
แอปพลิเคชัน
เครื่องมือปลายแขนกล (End-of-Arm Tooling หรือ EOAT) ถูกนำมาใช้กันอย่างแพร่หลายในอุตสาหกรรมต่างๆ เช่น การผลิตรถยนต์ อิเล็กทรอนิกส์ 3 มิติ โลจิสติกส์ การฉีดขึ้นรูปพลาสติก บรรจุภัณฑ์อาหารและยา และการแปรรูปโลหะ หน้าที่หลักของ EOAT ได้แก่ การจัดการชิ้นงาน การเชื่อม การพ่น การตรวจสอบ และการเปลี่ยนเครื่องมืออย่างรวดเร็ว EOAT ช่วยเพิ่มประสิทธิภาพการผลิต ความยืดหยุ่น และคุณภาพของผลิตภัณฑ์ได้อย่างมาก ทำให้เป็นส่วนสำคัญของระบบอัตโนมัติทางอุตสาหกรรมสมัยใหม่
คุณสมบัติ
ความแม่นยำสูง
ด้านตัวจับยึดที่ปรับด้วยลูกสูบทำหน้าที่ในการกำหนดตำแหน่ง ซึ่งให้ความแม่นยำในการกำหนดตำแหน่งซ้ำสูง การทดสอบหนึ่งล้านรอบแสดงให้เห็นว่าความแม่นยำที่แท้จริงสูงกว่าค่าที่แนะนำไว้มาก
ความแข็งแรงสูง
ลูกสูบล็อกที่มีเส้นผ่านศูนย์กลางกระบอกสูบขนาดใหญ่มีแรงล็อกที่แข็งแรง อุปกรณ์เร่งความเร็วปลายหุ่นยนต์ SCIC มีความสามารถในการต้านทานแรงบิดสูง เมื่อทำการล็อก จะไม่มีการสั่นสะเทือนเนื่องจากการเคลื่อนที่ด้วยความเร็วสูง จึงช่วยป้องกันการล็อกล้มเหลวและรับประกันความแม่นยำในการกำหนดตำแหน่งซ้ำๆ
ประสิทธิภาพสูง
กลไกการล็อคที่มีการออกแบบพื้นผิวทรงกรวยหลายชั้น ส่วนประกอบการซีลที่มีอายุการใช้งานยาวนาน และหัววัดสัมผัสแบบยืดหยุ่นคุณภาพสูง ถูกนำมาใช้เพื่อให้มั่นใจได้ว่าโมดูลสัญญาณจะสัมผัสกันอย่างแน่นหนา
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| ซีรี่ส์ Quick Changer | ||||
| แบบอย่าง | น้ำหนักบรรทุกสูงสุด | เส้นทางก๊าซ | แรงล็อคที่ 80 Psi (5.5 บาร์) | น้ำหนักผลิตภัณฑ์ |
| คิวซีเอ-05 | 5 กก. | 6-M5 | 620N | 0.4 กก. |
| คิวซีเอ-05 | 5 กก. | 6-M5 | 620N | 0.3 กก. |
| คิวซีเอ-15 | 15 กก. | 6-M5 | 1150N | 0.3 กก. |
| คิวซีเอ-25 | 25 กก. | 12-M5 | 2400N | 1.0 กก. |
| คิวซีเอ-35 | 35 กก. | 8-G1/8 | 2900N | 1.4 กก. |
| คิวซีเอ-50 | 50 กก. | 9-G1/8 | 4600N | 1.7 กก. |
| คิวซีเอ-เอส50 | 50 กก. | 8-G1/8 | 5650เอ็น | 1.9 กก. |
| คิวซีเอ-100 | 100 กก. | 7-G3/8 | 12000N | 5.2 กก. |
| คิวซีเอ-เอส100 | 100 กก. | 5-G3/8 | 12000N | 3.7 กก. |
| คิวซีเอ-เอส150 | 150 กก. | 8-G3/8 | 12000N | 6.2 กก. |
| คิวซีเอ-200 | 300 กก. | 12-G3/8 | 16000N | 9.0 กก. |
| QCA-200D1 | 300 กก. | 8-G3/8 | 16000N | 9.0 กก. |
| QCA-S350 | 350 กก. | / | 31000N | 9.4 กก. |
| คิวซีเอ-เอส500 | 500 กก. | / | 37800N | 23.4 กก. |

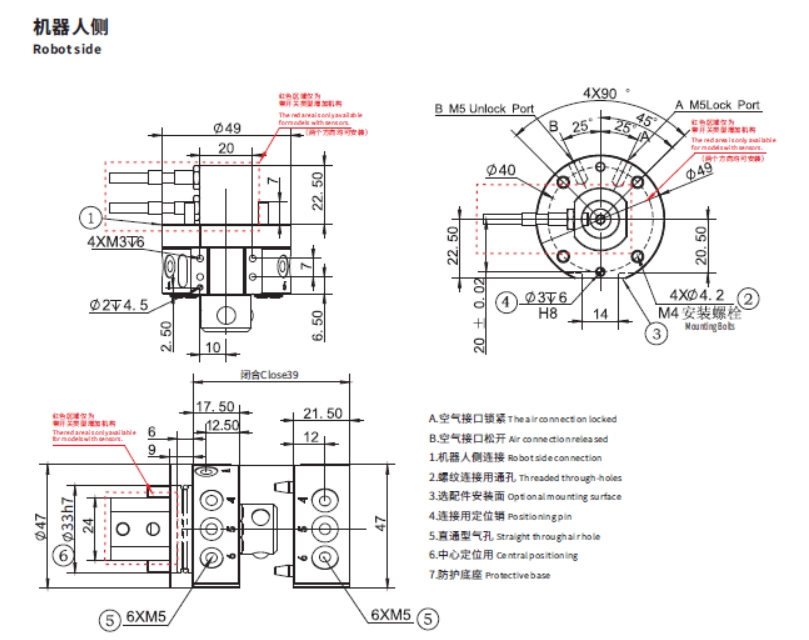
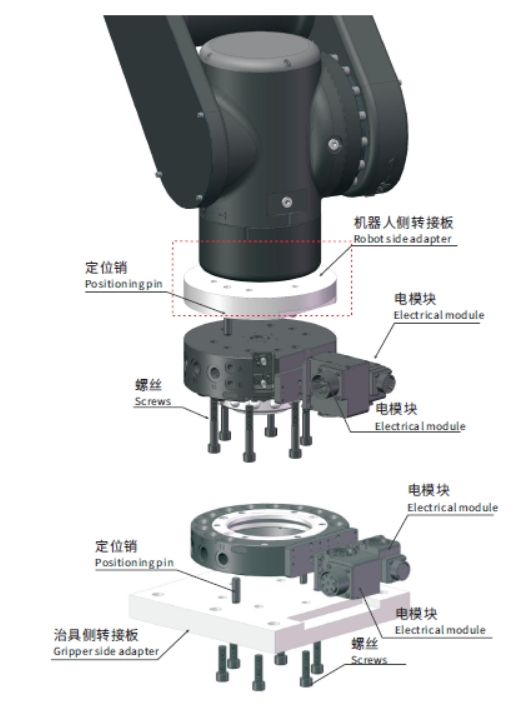
โมดูลสัญญาณฝั่งหุ่นยนต์

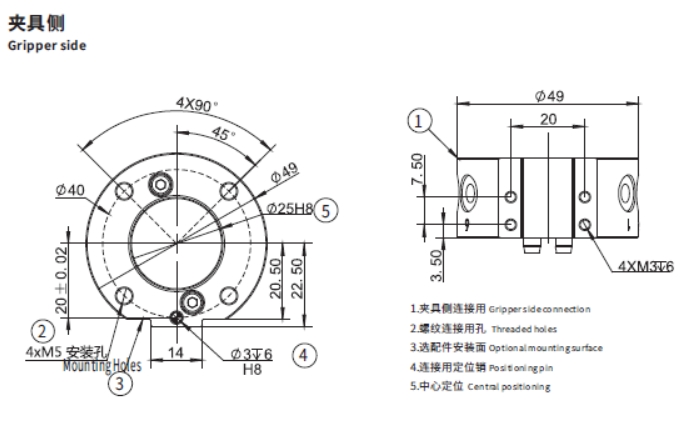
โมดูลสัญญาณด้านตัวจับยึด

ฝั่งหุ่นยนต์

ด้านที่จับ

สวิตช์สายรัดด้านข้างหุ่นยนต์
โมดูลที่เกี่ยวข้อง
ประเภทโมดูล
| ชื่อผลิตภัณฑ์ | แบบอย่าง | PN | แรงดันไฟฟ้าใช้งาน | กระแสไฟฟ้าที่ใช้งานอยู่ | ตัวเชื่อมต่อ | คอนเนคเตอร์ PN |
| โมดูลสัญญาณฝั่งหุ่นยนต์ | QCSM-15R1 | 7.Y00965 | 24 โวลต์ | 2.5เอ | DB15R1-1000① | 1.Y10163 |
| โมดูลสัญญาณด้านตัวจับยึด | QCSM-15G1 | 7.Y00966 | 24 โวลต์ | 2.5เอ | DB15G1-1000① | 1.Y10437 |
① สายเคเบิลมีความยาว 1 เมตร
โมดูล HF - สายส่งตรง
| ชื่อผลิตภัณฑ์ | แบบอย่าง | PN |
| โมดูลความถี่สูงฝั่งหุ่นยนต์ | QCHFM-02R-1000 | 7.Y02086 |
| โมดูลความถี่สูงด้านตัวจับยึด | QCHFM-02G-1000 | 7.Y02087 |
โมดูลไฟฟ้า 15 คอร์ - สายส่งตรง
| ชื่อผลิตภัณฑ์ | แบบอย่าง | PN |
| โมดูลไฟฟ้า 15 คอร์ฝั่งหุ่นยนต์ | QCSM-15R1-1000 | 7.Y02097 |
| โมดูลไฟฟ้า 15 แกนด้านตัวจับยึด | QCSM-15G1-1000 | 7.Y02098 |
โมดูลกำลังไฟฟ้า - สายส่งตรง
| ชื่อผลิตภัณฑ์ | แบบอย่าง | PN |
| โมดูลความถี่สูงฝั่งหุ่นยนต์ | QCSM-08R-1000 | 7.Y02084 |
| โมดูลความถี่สูงด้านตัวจับยึด | QCSM-08G-1000 | 7.Y02085 |
อินเทอร์เฟซสายเคเบิลเครือข่าย RJ45S
| ชื่อผลิตภัณฑ์ | แบบอย่าง | PN |
| โมดูลเซอร์โว RJ455 ด้านหุ่นยนต์ | QCSM-RJ45*5M-06R | 7.Y02129 |
| โมดูลเซอร์โว RJ455 ด้านตัวจับยึด | QCSM-RJ45*5M-06G | 7.Y02129 |
ธุรกิจของเรา


หมวดหมู่สินค้า
-

ชุดเปลี่ยนกระสุนเร็ว – QC-90 แบบกลม เกียร์ธรรมดา...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

ชุดเปลี่ยนเร็ว – QCA-200-D1 เปลี่ยนเร็ว...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGS SERIES –...
-

ชุดเปลี่ยนเลนส์เร็ว – QCA-200 ชุดเปลี่ยนเลนส์เร็ว...