แขนหุ่นยนต์ร่วมปฏิบัติงานรับน้ำหนักได้ 6 กก.





แขนหุ่นยนต์ร่วมปฏิบัติงานรับน้ำหนักได้ 6 กก.
หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
หุ่นยนต์ร่วมปฏิบัติงาน SCIC Z-Arm เป็นหุ่นยนต์น้ำหนักเบาแบบ 4 แกนที่มีมอเตอร์ขับเคลื่อนในตัว ไม่จำเป็นต้องใช้ตัวลดเกียร์เหมือนหุ่นยนต์ SCAR แบบดั้งเดิม ทำให้ลดต้นทุนได้ถึง 40% หุ่นยนต์ SCIC Z-Arm สามารถทำงานได้หลากหลาย รวมถึงแต่ไม่จำกัดเพียง การพิมพ์ 3 มิติ การจัดการวัสดุ การเชื่อม และการแกะสลักด้วยเลเซอร์ ช่วยเพิ่มประสิทธิภาพและความยืดหยุ่นในการทำงานและการผลิตของคุณได้อย่างมาก
คุณสมบัติ

ความแม่นยำสูง
ความสามารถในการทำซ้ำ
±0.05 มม.
น้ำหนักบรรทุกขนาดใหญ่
ขาตั้งหนัก 4 กก.
น้ำหนักสูงสุด 5 กก.
ความเร็วที่สูงขึ้น
ความเร็วเชิงเส้นสูงสุด 1.4 เมตร/วินาที
(รับน้ำหนักได้สูงสุด 4 กก.)
ราคาที่แข่งขันได้
คุณภาพระดับอุตสาหกรรม
Cราคาที่แข่งขันได้
ตั้งโปรแกรมง่าย ติดตั้งรวดเร็ว แขนหุ่นยนต์ 4 แกนที่ยืดหยุ่น
โหลดสูง
รับน้ำหนักมาตรฐาน: 4 กก.รับน้ำหนักสูงสุด: 5 กก.
ความแม่นยำสูง
ความแม่นยำในการวัดซ้ำ: ±0.05 มม.
แกน Z ที่ปรับแต่งเอง
ระยะการเคลื่อนที่ขึ้นลงสามารถปรับแต่งได้ระหว่าง 10 มม. ถึง 1000 มม.
ความเร็วสูง
ความเร็วเชิงเส้นสูงสุดถึง 1400 มม./วินาที ภายใต้น้ำหนักบรรทุก 4 กก.
ใช้งานง่าย
นอกจากนี้ยังใช้งานง่ายแม้สำหรับผู้ที่ไม่เคยรู้จักหุ่นยนต์มาก่อน
ระบบขับเคลื่อนและควบคุมแบบบูรณาการ
ไม่ต้องใช้วงจรเพิ่มเติม ติดตั้งและประกอบง่าย

ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
หุ่นยนต์แขนกล SCIC Z-Arm 4150 ออกแบบโดย SCIC Tech เป็นหุ่นยนต์ร่วมปฏิบัติงานน้ำหนักเบา โปรแกรมและใช้งานง่าย รองรับ SDK นอกจากนี้ยังรองรับการตรวจจับการชน กล่าวคือจะหยุดทำงานโดยอัตโนมัติเมื่อสัมผัสกับมนุษย์ ซึ่งเป็นการทำงานร่วมกันระหว่างมนุษย์และเครื่องจักรที่ชาญฉลาดและมีความปลอดภัยสูง
| แขนหุ่นยนต์ร่วมปฏิบัติงาน Z-Arm 4150 | พารามิเตอร์ |
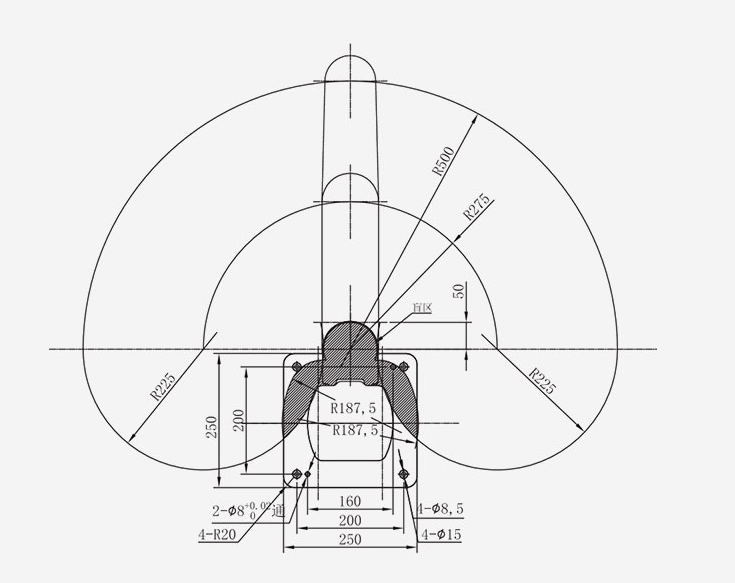
| ความยาวแขนแกนที่ 1 | 275 มม. |
| มุมการหมุนแกนที่ 1 | ±90° |
| ความยาวแขน 2 แกน | 225 มม. |
| มุมการหมุน 2 แกน | ±164° ตัวเลือกเพิ่มเติม: 15-345 องศา |
| ระยะการเคลื่อนที่ของแกน Z | ความสูง 410 สามารถปรับแต่งได้ |
| ช่วงการหมุนแกน R | ±1080° |
| ความเร็วเชิงเส้น | 1400 มม./วินาที (น้ำหนักบรรทุก 4 กก.) |
| ความสามารถในการทำซ้ำ | ±0.05 มม. |
| น้ำหนักบรรทุกมาตรฐาน | 4 กก. |
| น้ำหนักบรรทุกสูงสุด | 5 กก. |
| ระดับความเป็นอิสระ | 4 |
| แหล่งจ่ายไฟ | แรงดันไฟฟ้า 220V/110V 50-60HZ สามารถแปลงเป็นแรงดันไฟฟ้ากระแสตรง 48VDC กำลังไฟสูงสุด 960W |
| การสื่อสาร | อีเธอร์เน็ต |
| ความสามารถในการขยาย | ตัวควบคุมการเคลื่อนไหวแบบบูรณาการในตัวให้การรับส่งข้อมูล 24 ช่องสัญญาณ (I/O) พร้อมส่วนขยายใต้แขน |
| แกน Z สามารถปรับแต่งความสูงได้ | 0.1ม.~1ม. |
| การสอนการลากแกน Z | / |
| สงวนสิทธิ์อินเทอร์เฟซไฟฟ้า | การกำหนดค่ามาตรฐาน: สายไฟขนาด 24*23awg (ไม่มีฉนวนหุ้ม) จากแผงซ็อกเก็ตผ่านฝาครอบแขนด้านล่าง ตัวเลือกเพิ่มเติม: หลอดสุญญากาศ φ4 จำนวน 2 หลอด ผ่านแผงซ็อกเก็ตและหน้าแปลน |
| ตัวจับยึดไฟฟ้า HITBOT ที่ใช้งานร่วมกันได้ | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/the 5thแกนกลาง, การพิมพ์ 3 มิติ |
| แสงแห่งการหายใจ | / |
| ช่วงการเคลื่อนไหวของแขนข้างที่สอง | ค่ามาตรฐาน: ±164° ค่าเลือกได้: 15-345 องศา |
| อุปกรณ์เสริม (เลือกได้) | / |
| ใช้สิ่งแวดล้อม | อุณหภูมิแวดล้อม: 0-45°C ความชื้นสัมพัทธ์: 20-80%RH (ไม่มีน้ำค้างแข็ง) |
| พอร์ต I/O อินพุตดิจิทัล (แยกส่วน) | 9+3+การยืดปลายแขน (ไม่จำเป็น) |
| พอร์ต I/O เอาต์พุตดิจิทัล (แยกส่วน) | 9+3+การยืดปลายแขน (ไม่จำเป็น) |
| พอร์ต I/O อินพุตแบบอนาล็อก (4-20mA) | / |
| พอร์ต I/O เอาต์พุตอะนาล็อก (4-20mA) | / |
| ความสูงของแขนหุ่นยนต์ | 830 มม. |
| น้ำหนักแขนหุ่นยนต์ | ระยะชัก 410 มม. น้ำหนักสุทธิ 28 กก. |
| ขนาดฐาน | 250 มม.*250 มม.*15 มม. |
| ระยะห่างระหว่างรูยึดฐาน | ขนาด 200 มม. * 200 มม. พร้อมสกรู M8*20 จำนวน 4 ตัว |
| การตรวจจับการชน | √ |
| การสอนแบบลากจูง | √ |
รับน้ำหนักสูงสุด: 5 กก. เหมาะสำหรับงานประกอบ
Z-Arm XX50 เป็นแขนหุ่นยนต์ 4 แกนที่มีความยืดหยุ่นสูง รับน้ำหนักได้สูงสุดถึง 5 กิโลกรัม ใช้พื้นที่น้อย เหมาะสำหรับวางบนโต๊ะทำงานหรือภายในเครื่องจักร และเป็นตัวเลือกที่เหมาะสมสำหรับสายการผลิตประกอบอัตโนมัติ

น้ำหนักเบา มุมหมุนกว้าง

ผลิตภัณฑ์นี้มีน้ำหนักประมาณ 28 กิโลกรัม ระยะห่างระหว่างแขนสูงสุด 275 มิลลิเมตร มุมการหมุนของแกนที่ 1 คือ ±90° มุมการหมุนของแกนที่ 2 คือ ±164° และช่วงการหมุนของแกน R สามารถหมุนได้ถึง ±1080°
สามารถปรับความสูงได้อย่างง่ายดาย
ระบบขับเคลื่อนและควบคุมแบบรวมในตัว ไม่ต้องใช้วงจรเพิ่มเติม ติดตั้งและผสานรวมได้ง่าย ความสูงของแกน Z สามารถปรับแต่งได้ระหว่าง 10 มม. ถึง 1000 มม. และสามารถหมุนภายในเพื่อหลีกเลี่ยงสิ่งกีดขวางได้

ปรับใช้ได้ยืดหยุ่น สลับใช้งานได้อย่างรวดเร็ว
Z-Arm XX50 เป็นแขนหุ่นยนต์แบบบูรณาการสูง มีคุณสมบัติประหยัดพื้นที่และปรับใช้ได้อย่างยืดหยุ่น เหมาะสำหรับการใช้งานหลากหลายประเภทโดยไม่ต้องเปลี่ยนแปลงรูปแบบการผลิตปกติ รวมถึงการสลับการทำงานอย่างรวดเร็วและการผลิตสินค้าจำนวนน้อย เป็นต้น
การทำงานร่วมกันและความปลอดภัยที่ดีเยี่ยม
แขนหุ่นยนต์สามารถทำงานร่วมกับมนุษย์ได้โดยไม่ต้องมีอุปกรณ์ป้องกันเพิ่มเติม เพื่อทดแทนงานที่สกปรก อันตราย และน่าเบื่อ เพื่อหลีกเลี่ยงและลดอาการบาดเจ็บจากการใช้งานซ้ำๆ และอุบัติเหตุ

ระยะการเคลื่อนไหว รุ่น M1 (หมุนออกด้านนอก)
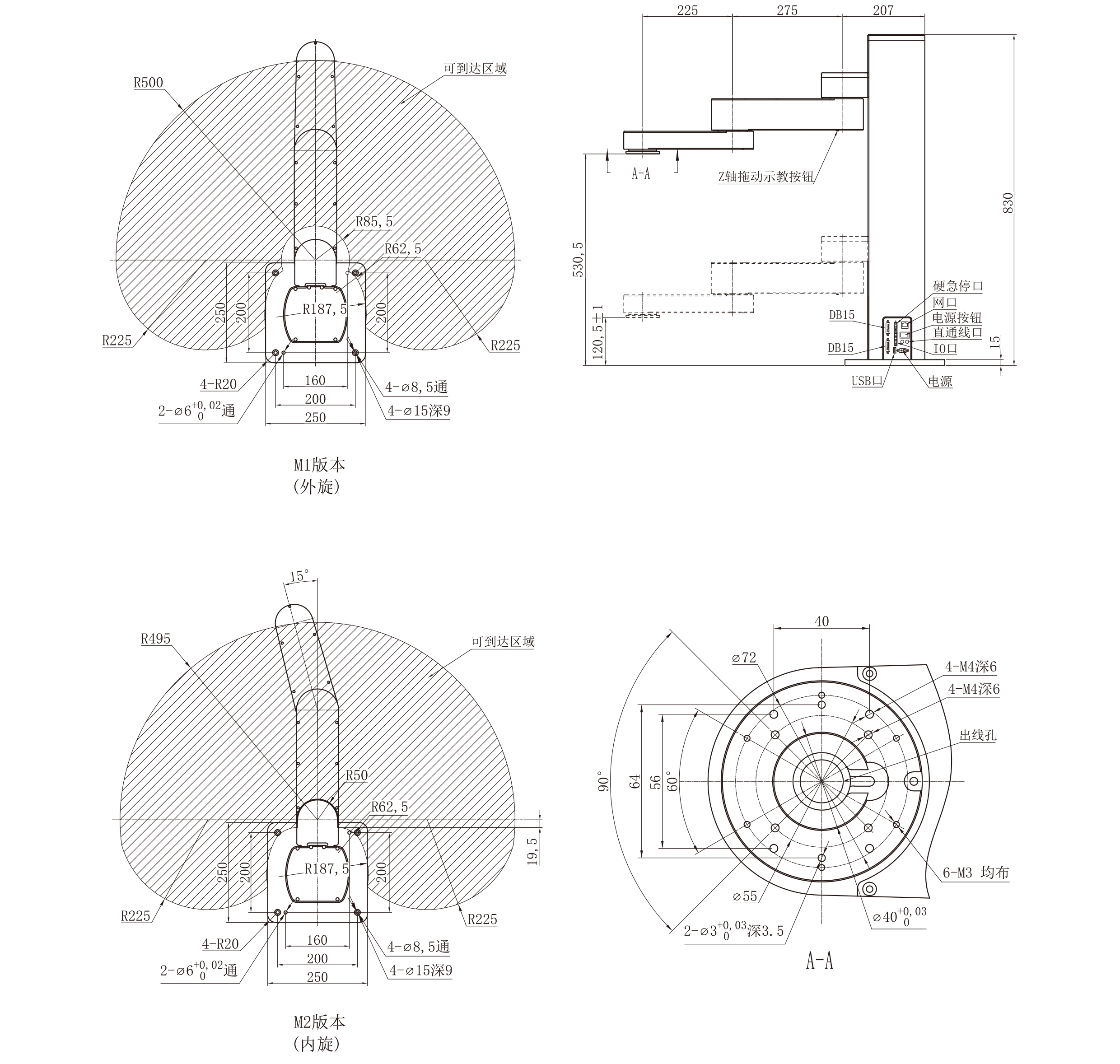
คำแนะนำเกี่ยวกับขั้วต่อ DB15

รุ่นที่แนะนำ: ตัวผู้ชุบทอง ตัวเรือน ABS รุ่น YL-SCD-15M ตัวเมียชุบทอง ตัวเรือน ABS รุ่น YL-SCD-15F
รายละเอียดขนาด: 55 มม.*43 มม.*16 มม.
(โปรดดูรูปที่ 5)
แผนภาพแสดงสภาพแวดล้อมการใช้งานภายนอกของแขนหุ่นยนต์

ธุรกิจของเรา


หมวดหมู่สินค้า
-

หุ่นยนต์ร่วมปฏิบัติงาน (Cobot) ราคาประหยัด ใช้ซ้ำได้ ปลอดภัย ผ่านการรับรองมาตรฐาน ISO...
-

แขนหุ่นยนต์อุตสาหกรรมสำหรับงานพ่นสี 6 แกน Szgh Colla...
-

ผู้ค้าส่งจากจีน เครื่องจัดเรียงพาเลท 4 แกนประสิทธิภาพสูง...
-
แขนหุ่นยนต์แบบยืดหดได้ 5 แกน ประสิทธิภาพสูง สำหรับ...
-

4086 แขนหุ่นยนต์ขนาดเล็กประสิทธิภาพสูงคุ้มค่าสำหรับอุตสาหกรรม...
-
แขนหุ่นยนต์อุตสาหกรรม 4 แกน...