ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-8S ตัวจับยึดไฟฟ้าแบบขนาน




หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน


คุณสมบัติ

● อุปกรณ์จับยึดไฟฟ้าแบบเซอร์โวมอเตอร์ขนาดเล็กแต่ทรงพลัง
● สามารถเปลี่ยนเทอร์มินัลได้เพื่อให้ตรงกับความต้องการของโครงการต่างๆ
● สามารถหยิบจับวัตถุที่แตกหักง่ายและเสียรูปทรงได้ เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
● เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการและโรงพยาบาล)
ระบบเซอร์โวแบบบูรณาการ ตัวจับยึดไฟฟ้าขนาดเล็ก
ตอบสนองรวดเร็ว
เวลาการตีครั้งเดียวที่สั้นที่สุดคือ 0.1 วินาที
แรงปรับได้
แรงยึดจับอยู่ที่ 8-20 นิวตัน (ปรับได้โดยการหมุน)
อายุการใช้งานยาวนาน
หลายสิบล้านรอบการทำงาน เกินกว่าขีดจำกัดของระบบจับยึดด้วยลม
ตัวควบคุมในตัว
ใช้พื้นที่น้อย สะดวกในการติดตั้ง
รูปเล็ก
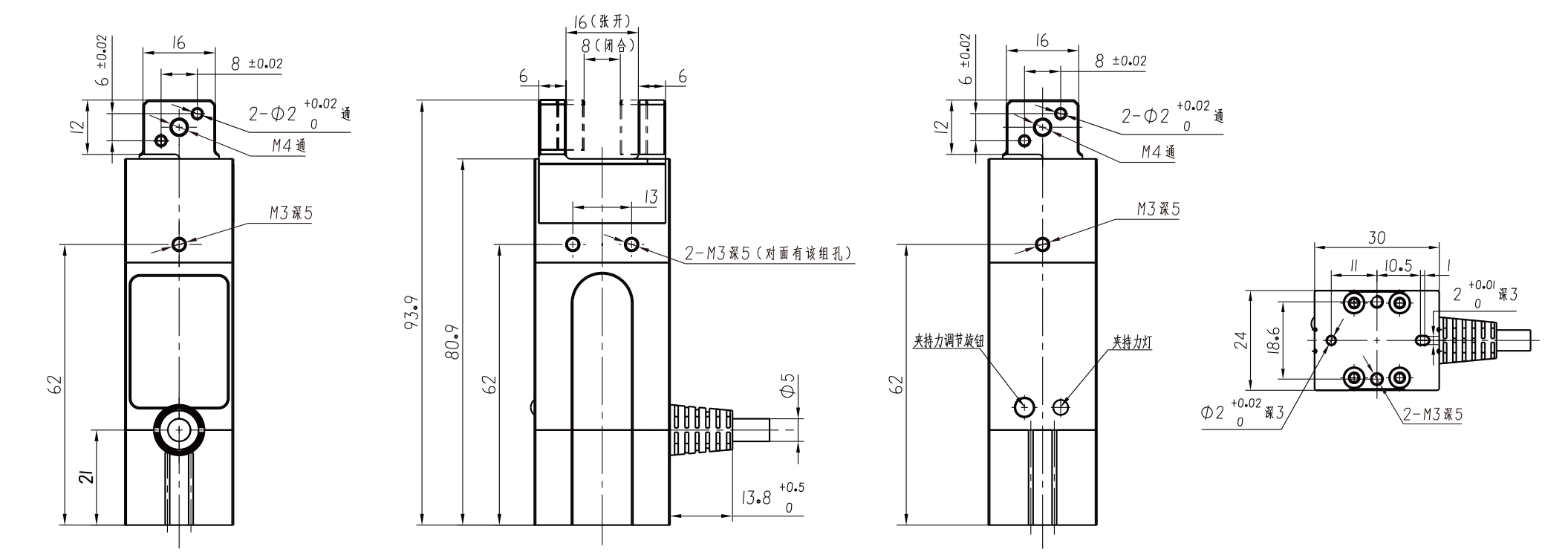
ขนาดของผลิตภัณฑ์เพียง 30*24*93.9 มม.
การหนีบแบบอ่อน
มันสามารถหนีบวัตถุที่เปราะบางได้

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
Z-EFG-8S เป็นหุ่นยนต์จับยึดไฟฟ้าแบบรวมระบบที่มีข้อดีหลายประการ เช่น ความแม่นยำสูงกว่าเมื่อเทียบกับเครื่องอัดอากาศแบบดั้งเดิม นอกจากนี้ ตัวจับยึดไฟฟ้า Z-EFG-8S ยังสามารถจับวัตถุอ่อนนุ่มและทำงานร่วมกับแขนหุ่นยนต์เพื่อสร้างสายการผลิตอัตโนมัติอย่างสมบูรณ์ได้
●อุปกรณ์จับยึดไฟฟ้าแบบเซอร์โวมอเตอร์ขนาดเล็กแต่ทรงพลัง
●สามารถเปลี่ยนเทอร์มินัลได้เพื่อให้ตรงกับข้อกำหนดของโครงการต่างๆ
●สามารถหยิบจับวัตถุที่แตกหักง่ายและเสียรูปทรงได้ เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
●เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการและโรงพยาบาล)
| รุ่นหมายเลข Z-EFG-8S | พารามิเตอร์ |
| ระยะชักทั้งหมด | 8 มม. |
| แรงยึดจับ | 8-20N (ปรับได้) |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| น้ำหนักการจับที่แนะนำ | 0.3 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + ตัวนำลูกกลิ้งขวาง |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.1 วินาที |
| น้ำหนัก | 0.25 กก. |
| มิติ | 30*24*93.9 มม. |
| แรงดันไฟฟ้าใช้งาน | 24V±10% |
| กระแสไฟฟ้าที่กำหนด | 0.2เอ |
| กระแสสูงสุด | 0.6เอ |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | มอเตอร์เซอร์โว |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |
| ระยะชักปรับได้ | ไม่สามารถปรับได้ |
| การวางตำแหน่งตัวควบคุม | ในตัว |
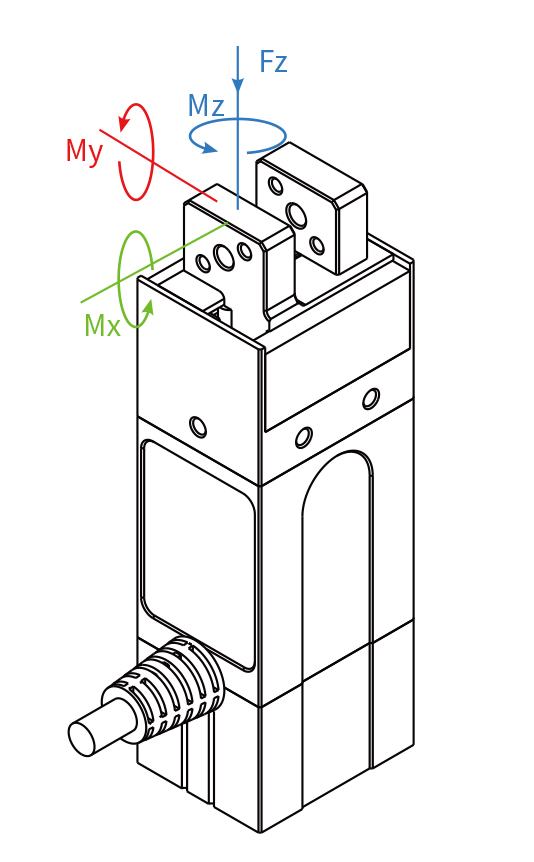
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 120N |
| แรงบิดที่อนุญาต | |
| มx: | 1.6 นิวตันเมตร |
| ของฉัน: | 1.8 นิวตันเมตร |
| มz: | 1.5 นิวตันเมตร |
ขนาดเล็ก โครงสร้างกะทัดรัด

ขนาดของตัวจับยึดไฟฟ้าตัวนี้คือ 30*24*93.9 มม. เส้นผ่านศูนย์กลางเล็กกว่าแบตเตอรี่ขนาดเล็ก ระยะการเคลื่อนที่ทั้งหมด 8 มม. โครงสร้างกะทัดรัด การกำหนดค่าไม่ซับซ้อน เหมาะสำหรับการใช้งานในพื้นที่ขนาดเล็ก


ตอบสนองรวดเร็ว เปิด/ปิดภายใน 0.1 วินาที

จังหวะการเคลื่อนที่ที่สั้นที่สุดของ Z-EFG-8S นั้นเพียง 0.01 วินาที สามารถเคลื่อนที่ได้ 10 ครั้งภายใน 1 วินาที เพื่อตอบสนองความต้องการการจับยึดที่รวดเร็วและเสถียรสำหรับสายการผลิตในโรงงาน
ควบคุมแรงได้อย่างแม่นยำ ใช้งานง่าย
เครื่องจับยึดไฟฟ้าได้รับการออกแบบระบบส่งกำลังและการคำนวณการขับเคลื่อนแบบพิเศษเพื่อชดเชยแรงสั่นสะเทือน แรงจับยึดสามารถปรับได้อย่างต่อเนื่องตั้งแต่ 8-20 นิวตัน น้ำหนักวัตถุที่จับยึดได้ไม่เกิน 0.3 กิโลกรัม เหมาะสำหรับใช้งานในห้องปฏิบัติการและโรงพยาบาล เป็นต้น


ระบบขับเคลื่อนและควบคุมแบบบูรณาการ, ระบบจับยึดแบบนุ่มนวล

ส่วนท้ายของ Z-EFG-8S สามารถเปลี่ยนได้ง่าย ลูกค้าสามารถหนีบวัตถุตามความต้องการของตนเองได้ และหากออกแบบส่วนท้ายเป็นพิเศษ ก็สามารถหนีบไข่ ท่อ แหวน และวัตถุที่แตกหักง่ายอื่นๆ ได้
การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
ธุรกิจของเรา







