แขนหุ่นยนต์เพื่อการทำงานร่วมกัน – แขนหุ่นยนต์โคบอท Z-Arm-S1400



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ทำงานร่วมกัน / กริปเปอร์ไฟฟ้า / แอคทูเอเตอร์อัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
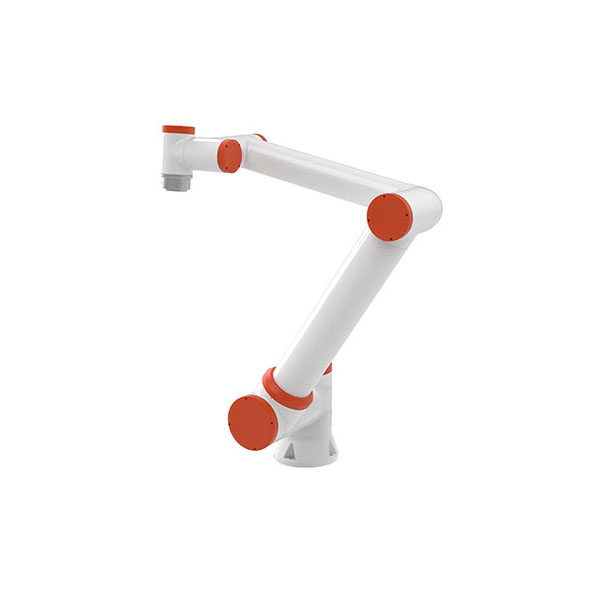
SCIC Z-Arm S1400 มีการออกแบบที่รัดกุมและละเอียดอ่อน มีการรวมตัวชะลอความเร็ว เครื่องจักรไฟฟ้า ตัวเข้ารหัส และตัวควบคุมไดรฟ์ ซึ่งช่วยเพิ่มความสะดวกในการติดตั้งหรือปรับใช้ใหม่อย่างมาก
เพียงแค่ใช้แขนวางในตำแหน่งที่ขอ หรือใช้โมดูลกราฟิกใน APP Z-Arm S1400 จะจดจำได้อย่างรวดเร็วและปฏิบัติตามเส้นทางที่แม่นยำใช้เวลาเพียงไม่กี่นาทีสำหรับกระบวนการที่ใช้งานง่าย
เพื่อความปลอดภัย Z-Arm S1400 เป็นแขนหุ่นยนต์แบบร่วมมือระหว่างคนและเครื่องจักรที่เป็นมิตร มันสามารถทำงานร่วมกับคนงานได้ง่าย ผู้ควบคุมสามารถเคลื่อนย้ายได้ง่ายในสภาพแวดล้อมโดยรอบโดยไม่ต้องกังวลว่าจะมีอิทธิพลต่อการทำงานของมันZ-Arm จะหยุดโดยอัตโนมัติเมื่อสัมผัสกับมนุษย์ ซึ่งสามารถสร้างสภาพแวดล้อมการทำงานอัตโนมัติเต็มรูปแบบที่ปลอดภัยอย่างสมบูรณ์
จุดไฟ

คุณสมบัติ
ประสิทธิภาพสูง
Wรัศมีการทำงาน: 1400 มม.
ความเร็วร่วม:180°/วินาที
ใช้งานง่าย
ลากการสอนและ
การเขียนโปรแกรมกราฟิก,
ความแม่นยำสูง
Eโหลดที่เหมาะสม: 10 กก.
การทำซ้ำ:±0.06mm.
การทำงานร่วมกัน
การทดสอบการชน, ใบอนุญาต
ปรับแต่งระดับการชน
Itergration สูง
ตัวลดแบบรวม, มotor, ตัวเข้ารหัส,
การขับขี่และผู้ควบคุม
แอ็พพลิเคชันกว้าง
นัดพบเพื่อประกอบ หยิบ และวาง
สกรูเกลียวและการจ่าย ฯลฯ
สินค้าที่เกี่ยวข้อง



ข้อมูลจำเพาะพารามิเตอร์
| ชื่อผลิตภัณฑ์: | ซี-อาร์ม S1400 |
| น้ำหนัก: | 40กก |
| น้ำหนักบรรทุก: | 10กก |
| เข้าถึง: | 1400มม |
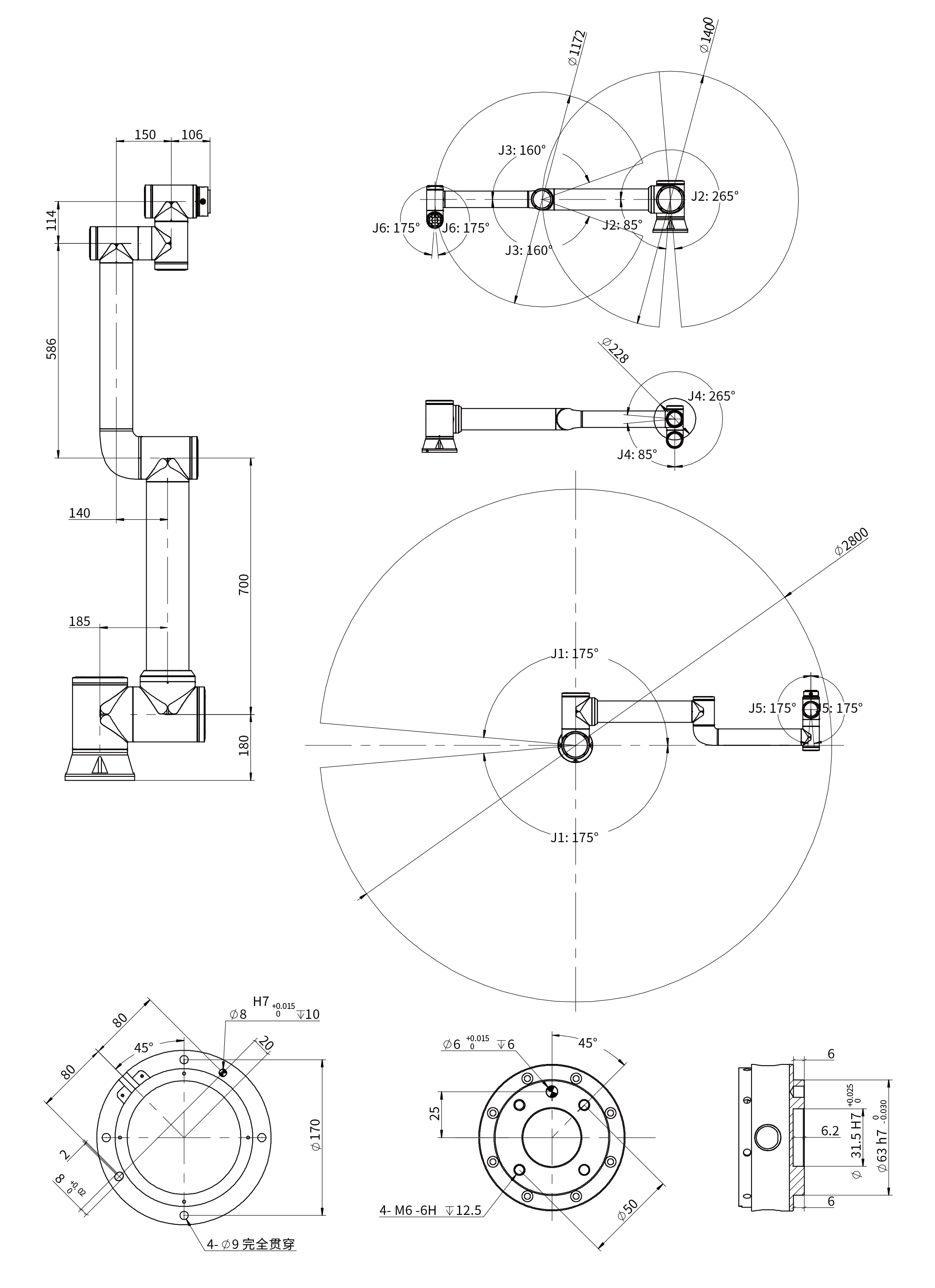
| ช่วงรอยต่อ: | แกน 1:±175° แกน 2:+85°,-265° แกน 3:±160° แกน 4:+85°,-265° แกน 5:±175° แกน 6:±175° |
| ความเร็วร่วม: | ±180°/วินาที |
| การทำซ้ำ: | ±0.05มม |
| สี่เหลี่ยม: | Φ190mm |
| ระดับความเป็นอิสระ: | 6 |
| ขนาดกล่องควบคุม: | 342*260*90มม |
| สิ้นสุดพอร์ต I/O: | อินพุตดิจิตอล:2 เอาต์พุตดิจิตอล:2 อินพุตแบบอะนาล็อก:1 เอาต์พุตแบบอะนาล็อก:1 |
| พอร์ต I/O ของกล่องควบคุม: | อินพุตดิจิตอล:16 เอาต์พุตดิจิตอล:16 อินพุตแบบอะนาล็อก:2 เอาต์พุตแบบอะนาล็อก:2 |
| แหล่งที่มาของ I/O : | 24V/1.5A |
| การสื่อสาร: | อีเธอร์เน็ต, TCP/IP, การสื่อสาร 485 |
| เสียงรบกวน: | <65Db |
| การจำแนก IP: | IP54 |
| การทำงานร่วมกัน: | การตรวจสอบแรงกระแทก ระดับการชนที่กำหนดเอง |
| กำลังไฟฟ้าเข้า: | 220V/50Hz |
| ใช้สภาพแวดล้อม: | อุณหภูมิแวดล้อม: 0-45°C ความชื้น: 20-80%RH85 (ไม่มีน้ำค้างแข็ง) |
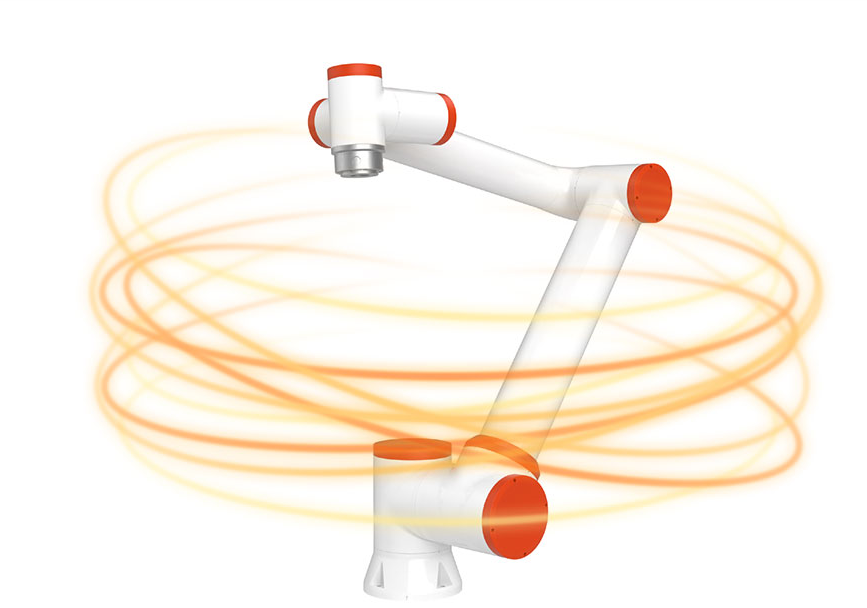
โหลดอย่างมีประสิทธิภาพ: 10กก. รัศมีการทำงานกว้าง: 1400มม
ช่วงการทำงานที่กว้าง ความสามารถในการรับน้ำหนักสูง

Z-Arm S1400 เป็นแขนหุ่นยนต์ 6 แกนซึ่งใช้งานได้หลากหลาย โหลดที่มีประสิทธิภาพคือ 10 กก. รัศมีการทำงานคือ 1400 มม. ซึ่งเหมาะมากสำหรับการวางซ้อน การบรรจุหีบห่อ และการบำรุงรักษาหุ่นยนต์ ฯลฯ
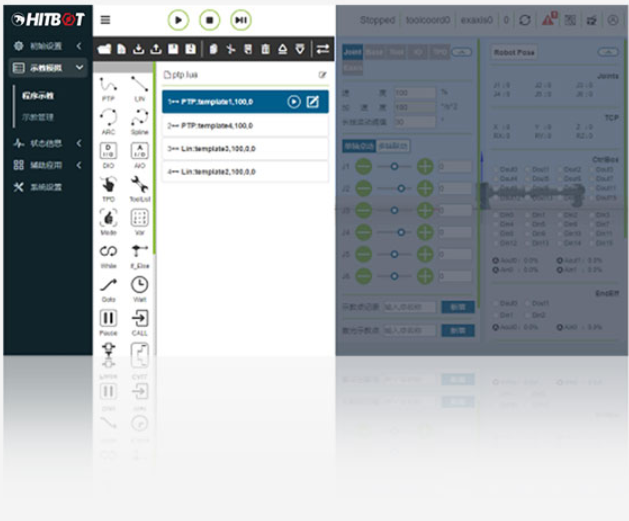
ลากการสอน ใช้งานง่าย
การสอนแบบลากและการเขียนโปรแกรมกราฟิกมีประสิทธิภาพในการลดเกณฑ์การใช้งานและค่าใช้จ่ายในการเรียนรู้เพื่อใช้อินเทอร์เฟซผู้ปฏิบัติงาน PC ที่เป็นมิตร แม้แต่สำหรับพนักงานฝ่ายผลิตที่ไม่มีประสบการณ์ในการเขียนโปรแกรม ก็ยังสามารถใช้งานได้โดยง่าย
การทำซ้ำสูง
Z-Arm S1400 ไม่ใช่แค่ความสามารถในการรับน้ำหนักสูงเท่านั้น ความสามารถในการทำซ้ำได้ถึง ±0.06 มม. การรวมผลิตภัณฑ์และเซ็นเซอร์แรงบิดสามารถทำงานที่มีความแม่นยำสูงได้อย่างแม่นยำด้วยการตั้งโปรแกรม


ประหยัดและประสิทธิภาพสูง ยืดหยุ่นในการปรับใช้
ความเร็วสูงสุดของข้อต่อผลิตภัณฑ์คือ 180°/วินาที สามารถเคลื่อนย้ายระหว่างงานได้อย่างรวดเร็ว น้ำหนักผลิตภัณฑ์ประมาณ 40Kg พื้นที่ติดตั้ง Φ190มม.สามารถปรับใช้แอปพลิเคชันจำนวนมากซ้ำได้โดยไม่ต้องเปลี่ยนรูปแบบการผลิต
การทำงานร่วมกันที่ยอดเยี่ยมและความปลอดภัย
Z-Arm S1400 มีฟังก์ชั่นการทดสอบการชน อนุญาตให้ปรับแต่งระดับการชนได้ สามารถทำงานได้ตามปกติภายใต้สภาพแวดล้อมที่เป็นอันตราย สามารถทำงานได้ต่อเนื่อง 24 ชั่วโมง/365 วัน
ช่วงและขนาด
ธุรกิจของเรา



