เครื่องกำเนิดสุญญากาศแบบนิวแมติกสองนิ้วสำหรับหุ่นยนต์อัตโนมัติ



เครื่องกำเนิดสุญญากาศแบบนิวแมติกสองนิ้วสำหรับหุ่นยนต์อัตโนมัติ
หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน

ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน
คุณสมบัติ
• จังหวะการตีที่ใหญ่
• แรงหนีบและระยะการเคลื่อนที่สามารถปรับได้
• อายุการใช้งานยาวนาน: หลายสิบล้านรอบการใช้งาน เหนือกว่ากรงเล็บอากาศ
• ตัวควบคุมในตัว: ขนาดเล็ก ติดตั้งง่าย
· การควบคุมบัส EIA485, อินพุต/เอาต์พุต
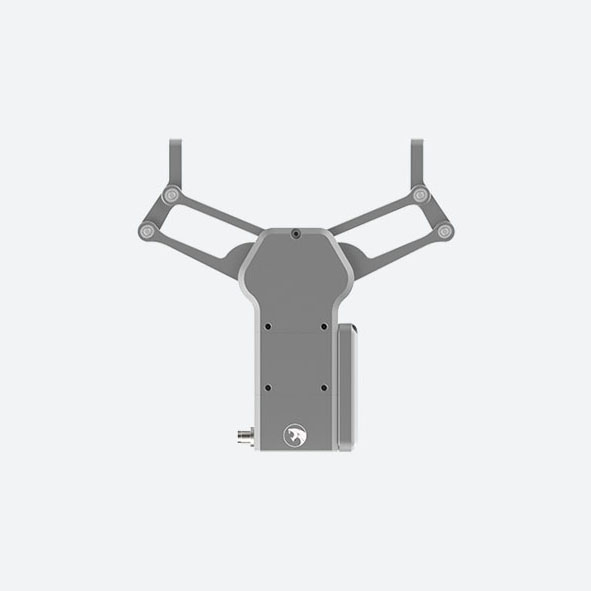
แรงจับยึด: 40-130 นิวตัน, ตัวจับยึดไฟฟ้าแบบรูปตัว Y ระยะการเคลื่อนที่ 120 มิลลิเมตร
จังหวะยาว
ระยะชักทั้งหมด: 120 มม.
โหมดควบคุม
485 Modbus, EIA485, การควบคุมบัส
แรงยึด
แรงหนีบปรับได้ 40-130N
ตัวควบคุมภายใน
ใช้พื้นที่น้อย ติดตั้งง่าย
การควบคุมความแม่นยำ
ความแม่นยำในการวัดซ้ำ: ±0.02 มม.
การหนีบแบบอ่อน
สามารถหนีบวัตถุที่เปราะบางและเสียรูปทรงได้ง่าย

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| รุ่นหมายเลข Z-EFG-130 | พารามิเตอร์ |
| ทั้งหมด จังหวะ | 120 มม. |
| แรงยึดจับ | 40-130N |
| ความสามารถในการทำซ้ำ | ±0.02 มม. |
| น้ำหนักการจับที่แนะนำ | น้ำหนักสูงสุด 1 กก. |
| การแพร่เชื้อ โหมด | น็อตเกลียว + ข้อต่อ |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.9 วินาที |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80(ไม่มีน้ำค้างแข็ง) |
| โหมดการเคลื่อนไหว | การเชื่อมโยง |
| การควบคุมจังหวะ | ปรับได้ |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 0.8 กก. |
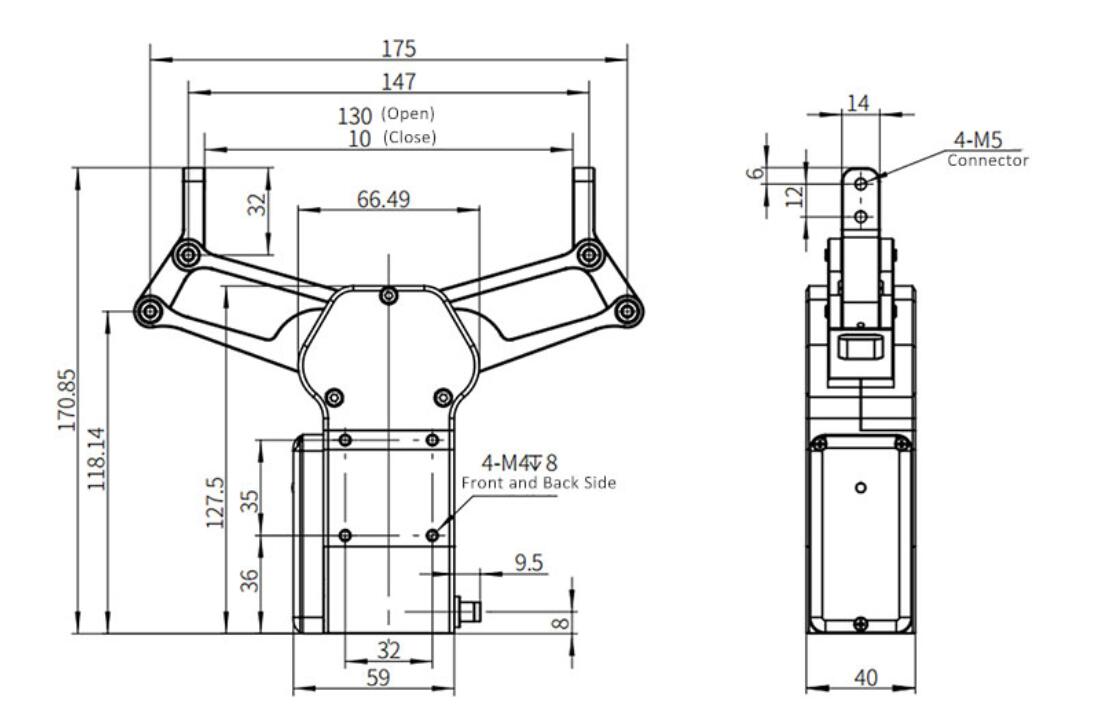
| มิติ(ล*ว*ฮ) | 171*187*40 มม. (เมื่อกางออก) 218*66.5*40 มม. (เมื่อพับเก็บ) |
| การวางตำแหน่งตัวควบคุม | ในตัว |
| พลัง | 10 วัตต์ |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| กระแสสูงสุด | 2A |
| แรงดันไฟฟ้าที่กำหนด | 24 โวลต์ |
| กระแสไฟสแตนด์บาย | 0.4เอ |
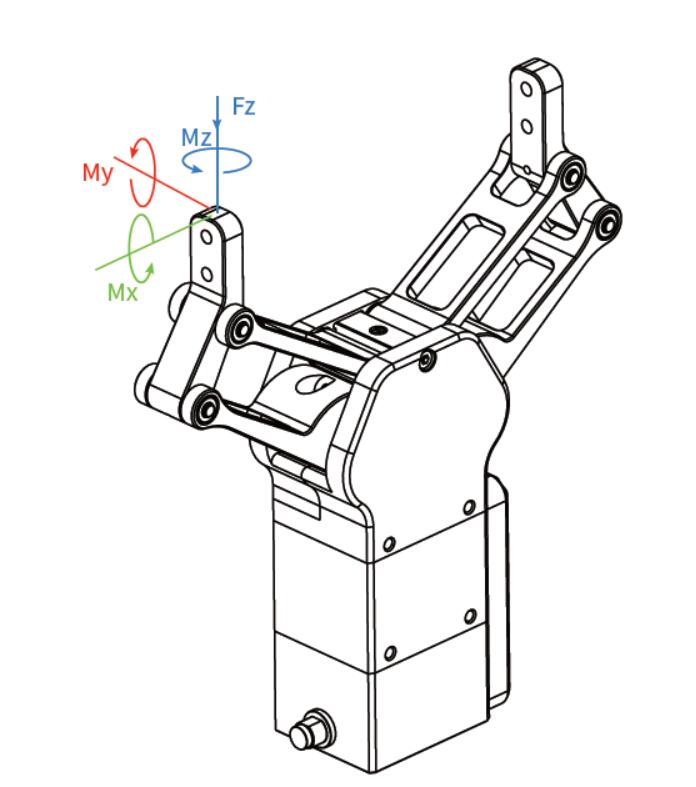
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 200N |
| แรงบิดที่อนุญาต | |
| มx: | 2 นิวตันเมตร |
| ของฉัน: | 2 นิวตันเมตร |
| มz: | 2 นิวตันเมตร |
เสียบปลั๊กแล้วใช้งานได้ทันที สะดวกในการติดตั้ง
ตัวจับยึดไฟฟ้า Z-EFG-130 สามารถใช้งานร่วมกับแขนหุ่นยนต์ร่วมปฏิบัติงานได้ และมีระบบเซอร์โวในตัว โดยตัวจับยึดเพียงตัวเดียวสามารถเทียบเท่ากับคอมเพรสเซอร์ + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดลมได้


ระยะชักยาว เข้ากันได้ดีเยี่ยม
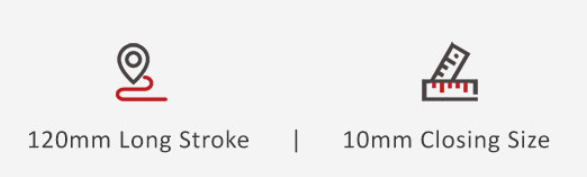
ตัวจับยึดไฟฟ้าที่มีประสิทธิภาพสามารถมีระยะการเคลื่อนที่ได้สูงสุดถึง 120 มม. ขนาดการปิดอยู่ที่ 10 มม. ตัวจับยึดไฟฟ้านี้สามารถใช้ได้กับชิปเซมิคอนดักเตอร์ อุปกรณ์อิเล็กทรอนิกส์ 3C และอุตสาหกรรมที่ต้องการความแม่นยำสูงอื่นๆ เป็นต้น
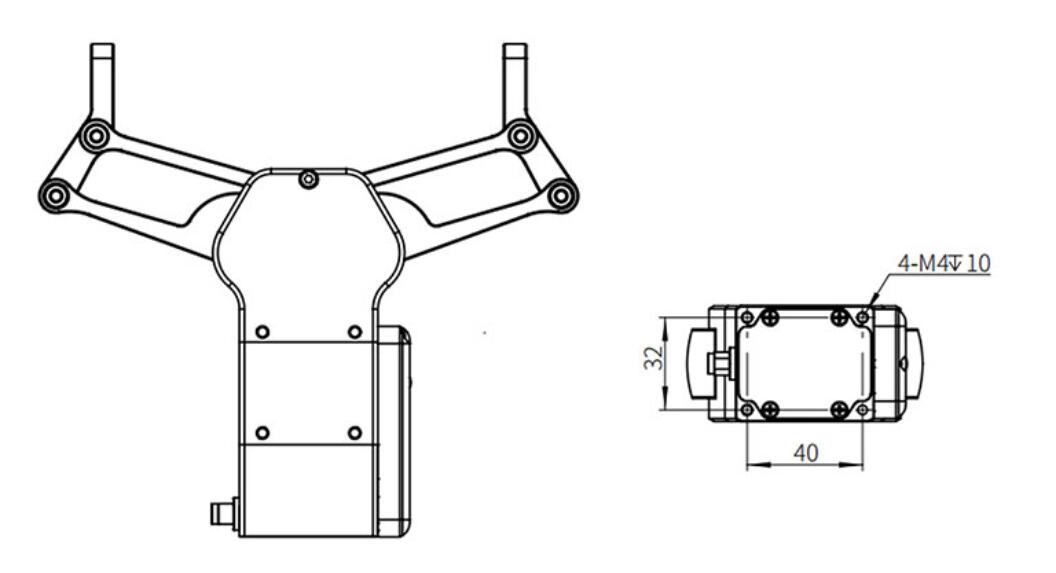
ขนาดเล็ก พกพาสะดวก

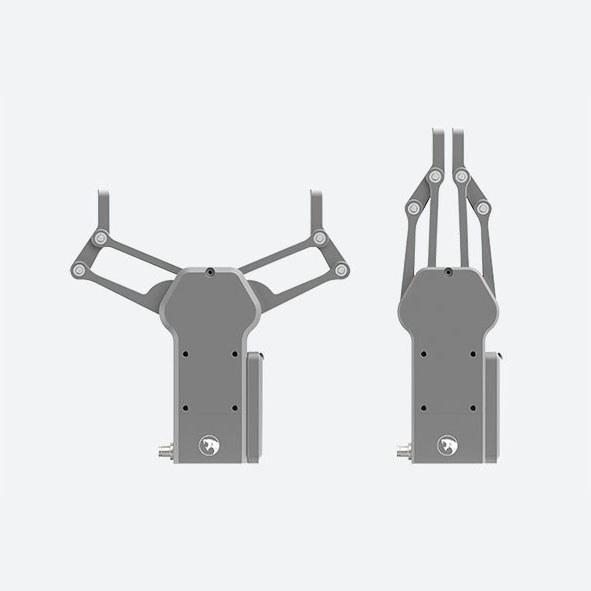
Z-EFG-130 มีขนาดตอนเปิด 171*187*40 มม. และขนาดตอนปิด 218*66.5*40 มม. มีโครงสร้างกะทัดรัด รองรับการติดตั้งได้หลายรูปแบบ มีตัวควบคุมอยู่ภายใน และใช้พื้นที่น้อย

การควบคุมแรงที่แม่นยำ
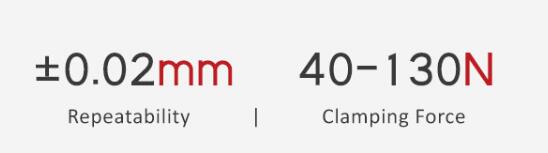
ตัวจับยึดไฟฟ้าใช้การออกแบบระบบส่งกำลังแบบพิเศษและการชดเชยอัลกอริธึมการขับเคลื่อน แรงจับยึดสามารถปรับได้ 40-130N น้ำหนักจับยึดที่แนะนำ ≤1 กก. และสามารถทำซ้ำได้อย่างแม่นยำ ±0.02 มม.
การจับที่ปรับเปลี่ยนได้, หางที่เปลี่ยนได้

ตัวจับยึดไฟฟ้า Z-EFG-130 รองรับการจับยึดแบบปรับได้ เหมาะสำหรับวัตถุทรงกลม ทรงรี หรือรูปทรงพิเศษต่างๆ ส่วนท้ายสามารถเปลี่ยนได้ง่าย ลูกค้าสามารถจับยึดวัตถุได้ตามความต้องการ


โหมดควบคุมหลากหลาย ใช้งานง่าย

ตัวจับยึดไฟฟ้าสามารถควบคุมได้อย่างแม่นยำด้วยระบบ Modbus การกำหนดค่าทำได้ง่าย โดยใช้โปรโตคอลการสื่อสารแบบดิจิทัล I/O เพียงแค่ใช้สายเคเบิลเส้นเดียวเชื่อมต่อกับสวิตช์เปิด/ปิด ก็สามารถใช้งานร่วมกับระบบควบคุมหลัก PLC ได้
การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
ธุรกิจของเรา






