เครื่องจับยึดไฟฟ้า HITBOT ซีรีส์ – Z-EFG-40-100 แบบกว้าง



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

• แรงยึดจับสูง ระบบล็อคตัวเองเชิงกล
• ระยะชักปรับได้ แรงหนีบปรับได้
·อายุการใช้งานยาวนาน: หลายสิบล้านรอบการใช้งาน เหนือกว่ากรงเล็บอากาศ
• ตัวควบคุมในตัว: ขนาดกะทัดรัด ผสานรวมได้ง่าย
·โหมดควบคุม: 485 (Modbus RTU), อินพุต/เอาต์พุต
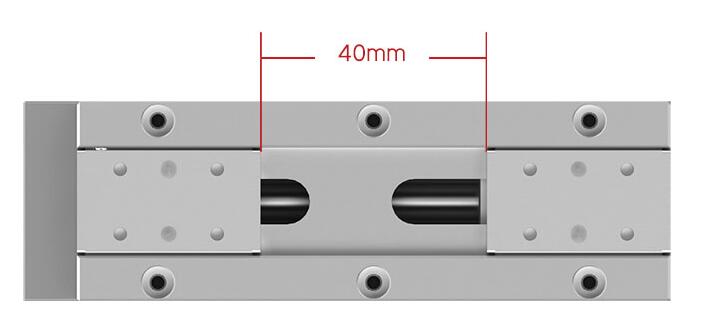
ระยะชัก 40 มม., แรงหนีบ 100 นิวตัน, ระบบล็อคอัตโนมัติแบบกลไก, ไม่หล่นลงมาหลังจากปิดเครื่อง
บิ๊กสโตรก
ระยะชักทั้งหมดสามารถปรับได้ 40 มม.
แรงยึด
40-100N, น้ำหนักที่แนะนำสำหรับการหนีบ ≤1 กก.
การล็อคตัวเองเชิงกล
ระบบล็อคอัตโนมัติแบบกลไก ป้องกันการหล่นแม้ไฟดับ
ตัวควบคุมถูกติดตั้งไว้แล้ว
เหมาะสำหรับห้องขนาดเล็ก ติดตั้งง่าย
ตอบสนองรวดเร็ว
เวลาที่สั้นที่สุดสำหรับการตีครั้งเดียวคือเพียง 0.4 วินาที
อายุการใช้งานยาวนาน
หลายสิบล้านรอบ มากกว่านั้นของอุปกรณ์จับยึดอากาศ

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| หมายเลขรุ่น Z-EFG-40-100 | พารามิเตอร์ |
| ระยะชักทั้งหมด | ปรับได้ 40 มม. |
| แรงยึดจับ | ปรับได้ 40-100N |
| ความสามารถในการทำซ้ำ | ±0.02 มม. |
| น้ำหนักการจับที่แนะนำ | ≤1 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + ตัวนำทรงกลม |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.4 วินาที |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| น้ำหนัก | 1 กก. |
| ขนาด (ยาว*กว้าง*สูง) | 85*37*120 มม. |
| แรงดันไฟฟ้าใช้งาน | 24V±10% |
| กระแสไฟฟ้าที่กำหนด | 0.5A |
| กระแสสูงสุด | 4A |
| พลัง | 12 วัตต์ |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |
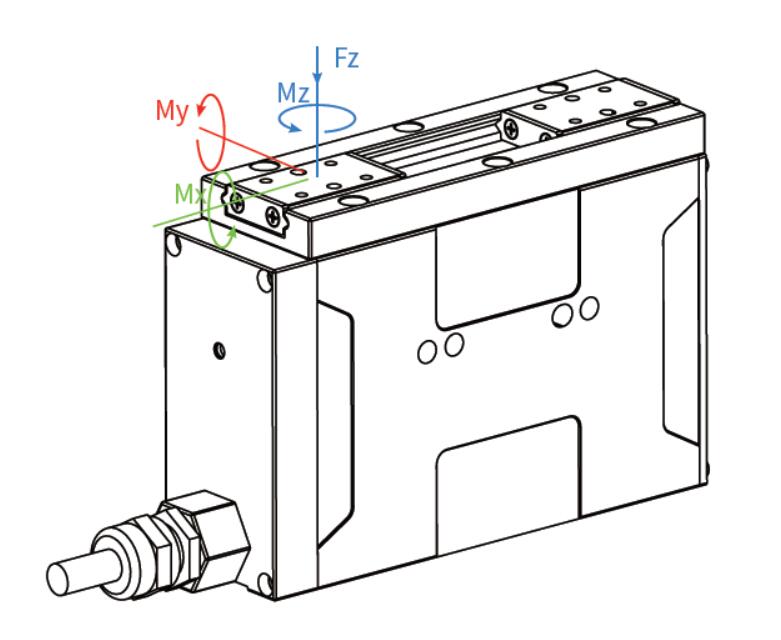
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 200N |
| แรงบิดที่อนุญาต | |
| มx: | 8 นิวตันเมตร |
| ของฉัน: | 6.1 นิวตันเมตร |
| มz: | 6.1 นิวตันเมตร |
การควบคุมแรงที่แม่นยำ ความสม่ำเสมอสูง

ตัวจับยึดไฟฟ้า Z-EFG-40-100 ใช้การออกแบบระบบส่งกำลังและการชดเชยอัลกอริทึมการขับเคลื่อนแบบพิเศษ ระยะการเคลื่อนที่ทั้งหมด 40 มม. แรงจับยึด 40-100 นิวตัน สามารถปรับระยะการเคลื่อนที่และแรงได้ และมีความแม่นยำในการทำซ้ำ ±0.02 มม.

ตอบสนองรวดเร็ว เสถียรยิ่งขึ้น

ตัวจับยึดไฟฟ้าใช้ระบบส่งกำลังแบบแกนสกรู + สายพานไทม์มิ่ง + รางลูกบอล โดยมีเวลาในการเคลื่อนที่ต่อครั้งที่สั้นที่สุดเพียง 0.4 วินาที ซึ่งสามารถตอบสนองความต้องการในการจับยึดสำหรับสายการผลิตได้
ใช้พื้นที่น้อย สะดวกในการติดตั้ง

ตัวจับยึดไฟฟ้าใช้ระบบจับยึดแบบ 2 นิ้วขนานกัน ขนาด L85*W37*H120 มม. โครงสร้างกะทัดรัด รองรับโหมดการติดตั้งได้มากกว่า 5 โหมด มีตัวควบคุมในตัว ใช้พื้นที่น้อย ทำให้สามารถจัดการกับงานจับยึดต่างๆ ได้อย่างง่ายดาย


ระบบขับเคลื่อนและควบคุมแบบบูรณาการพร้อมระบบจับยึดแบบนุ่มนวล

ส่วนหางของ Z-EFG-40-100 สามารถเปลี่ยนได้ง่าย น้ำหนักในการจับยึดไม่เกิน 1 กก. ลูกค้าสามารถออกแบบส่วนหางให้เหมาะสมกับวัตถุที่ต้องการจับยึด เพื่อรับประกันว่าตัวจับยึดไฟฟ้าจะสามารถทำงานจับยึดได้อย่างเต็มประสิทธิภาพ
โหมดควบคุมหลากหลาย ใช้งานง่าย

การกำหนดค่าของตัวจับยึดไฟฟ้า Z-EFG-40-100 นั้นง่าย และมีโหมดควบคุมมากมาย รวมถึง 485 (Modbus RTU), Pulse และ I/O ซึ่งเข้ากันได้กับระบบควบคุมหลัก PLC

การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
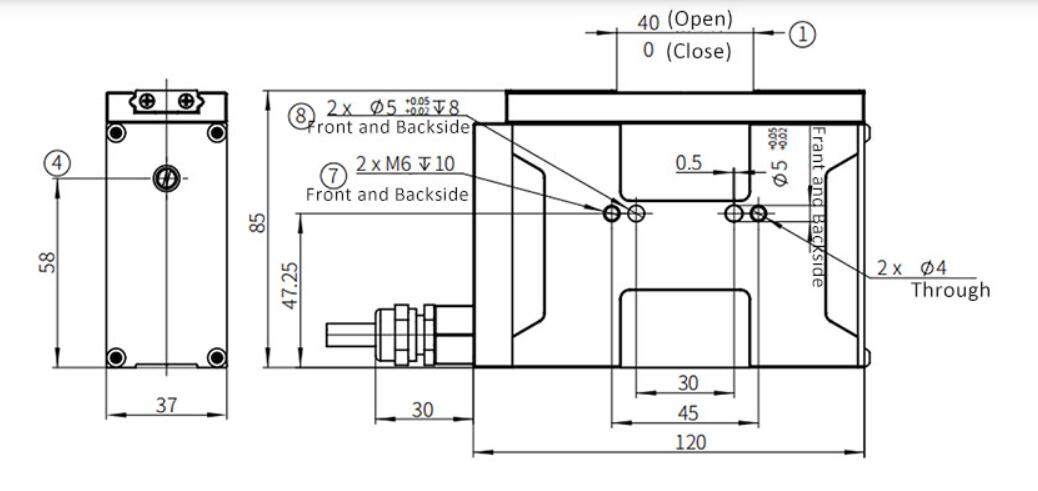
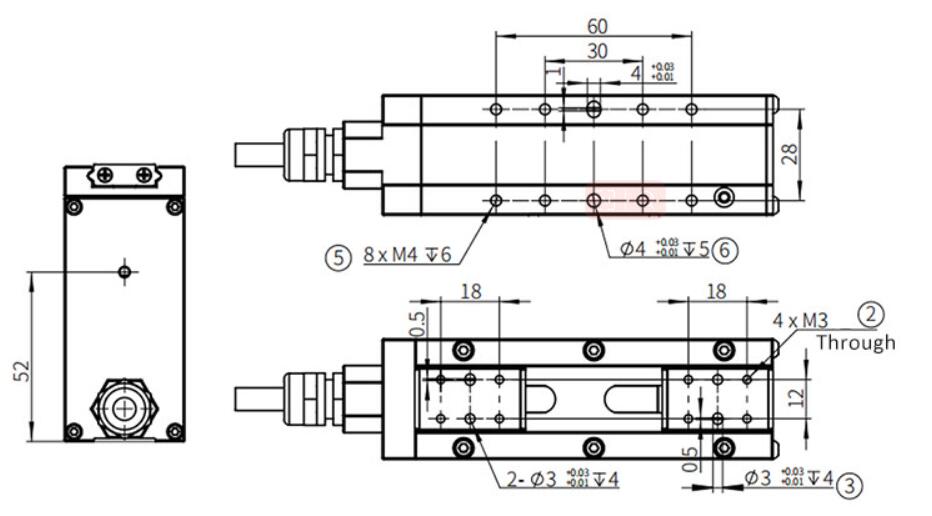
1) ระยะการเคลื่อนที่ของตัวจับยึดไฟฟ้า
2) ตำแหน่งติดตั้ง (รูเกลียว)
3) จุดติดตั้ง (รูเข็ม)
4) ตำแหน่งการเปิดและปิดมือ
5) ตำแหน่งติดตั้งด้านล่าง (รูเกลียว)
6) ตำแหน่งติดตั้งด้านล่าง (รูเข็ม)
7) จุดติดตั้งด้านข้าง (รูเล็ก)
8) ตำแหน่งติดตั้งด้านข้าง (รูเกลียว)
ธุรกิจของเรา


หมวดหมู่สินค้า
-

HITBOT มือจับไฟฟ้า SERIES – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

ชุดเครื่องจับยึดไฟฟ้า HITBOT – รุ่น Z-EMG-4 แบบขนาน...
-

เครื่องมือจับยึดไฟฟ้า HITBOT รุ่น Z-EFG-20S สำหรับพารา...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...