ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-C50 อุปกรณ์จับยึดไฟฟ้าแบบทำงานร่วมกัน




หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

• การตรวจจับการตกของตัวจับยึด, ฟังก์ชันการส่งออกพื้นที่
• สามารถควบคุมแรง ตำแหน่ง และความเร็วได้อย่างแม่นยำผ่านทาง Modbus
·อายุการใช้งานยาวนาน: หลายสิบล้านรอบการใช้งาน เหนือกว่ากรงเล็บอากาศ
• ตัวควบคุมในตัว: ขนาดกะทัดรัด ผสานรวมได้ง่าย
·โหมดควบคุม: 485 (Modbus RTU), อินพุต/เอาต์พุต
ระยะชัก 50 มม., แรงหนีบ 140 นิวตัน, ใช้ได้กับแขนหุ่นยนต์ 6 แกน
ความถี่สูง
เวลาในการชักที่สั้นที่สุดคือ 0.5 วินาที
ความแม่นยำสูง
ความแม่นยำในการวัดซ้ำคือ ±0.03 มม.
น้ำหนักบรรทุกสูง
น้ำหนักยึดที่แนะนำ ≤2 กก.
เสียบปลั๊กแล้วใช้งานได้เลย
ตัวจับยึดไฟฟ้าสำหรับแขนหุ่นยนต์ 6 แกนโดยเฉพาะ
หางเปลี่ยนได้
หางของมันสามารถปรับเปลี่ยนได้ เหมาะสำหรับความต้องการที่หลากหลาย
แรงยึดที่นุ่มนวล
สามารถหนีบวัตถุที่เปราะบางและเสียรูปทรงได้

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| รุ่นหมายเลข Z-EFG-C50 | พารามิเตอร์ |
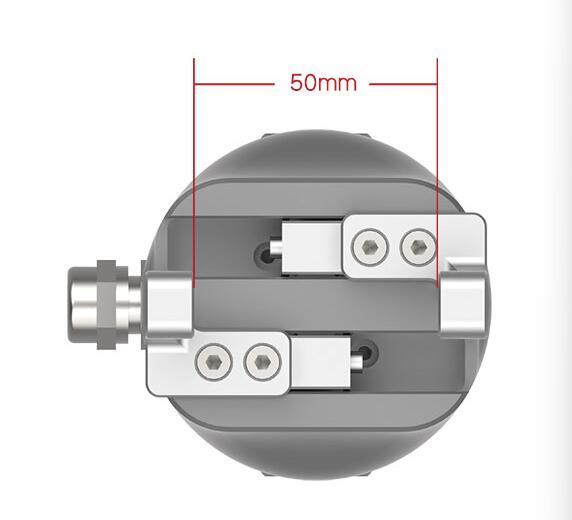
| ระยะชักทั้งหมด | ปรับได้ 50 มม. |
| แรงยึดจับ | ปรับได้ 40-140N |
| ความสามารถในการทำซ้ำ | ±0.03 มม. |
| น้ำหนักการจับที่แนะนำ | ≤2 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + ตัวนำทรงกลม |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.5 วินาที |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| น้ำหนัก | 1 กก. |
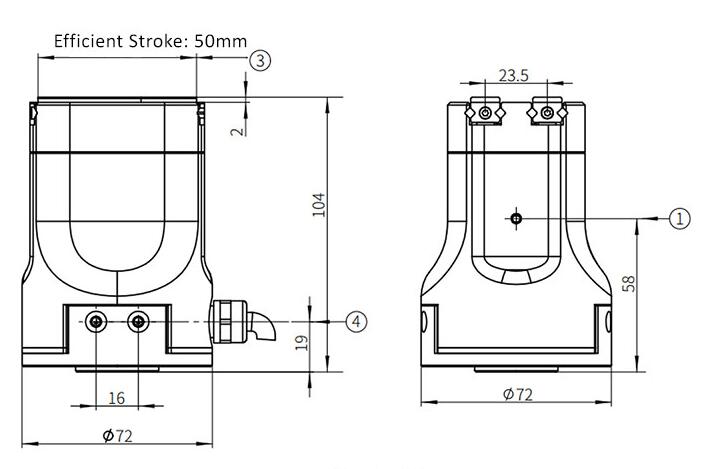
| ขนาด (ยาว*กว้าง*สูง) | 72*72*143 มม. |
| แรงดันไฟฟ้าใช้งาน | 24V±10% |
| กระแสไฟฟ้าที่กำหนด | 0.8เอ |
| กระแสสูงสุด | 2A |
| พลัง | 20 วัตต์ |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |

| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 300N |
| แรงบิดที่อนุญาต | |
| มx: | 7 นิวตันเมตร |
| ของฉัน: | 7 นิวตันเมตร |
| มz: | 7 นิวตันเมตร |
ระบบขับเคลื่อนและควบคุมแบบบูรณาการ
ตัวจับยึดไฟฟ้า Z-EFG-C50 มีระบบเซอร์โวในตัว ระยะการเคลื่อนที่ทั้งหมด 50 มม. แรงจับยึด 40-140 นิวตัน สามารถปรับระยะการเคลื่อนที่และแรงจับยึดได้ และมีความแม่นยำในการทำซ้ำ ±0.03 มม.

ใช้งานร่วมกับแขนหุ่นยนต์หกแกนได้

ตัวจับยึดไฟฟ้าสามารถใช้งานร่วมกับแขนหุ่นยนต์ 6 แกนได้ ทำให้ใช้งานได้ทันทีโดยไม่ต้องตั้งค่าเพิ่มเติม เวลาในการจับยึดแต่ละครั้งสั้นที่สุดเพียง 0.5 วินาที ซึ่งสามารถตอบสนองความต้องการในการจับยึดสำหรับสายการผลิตที่มีเสถียรภาพ
ขนาดเล็ก ติดตั้งง่าย

Z-EFG-C50 ใช้ระบบส่งกำลังแบบเฟืองแร็ค + รางนำลูกบอล ขนาดผลิตภัณฑ์ L72*W72*H143 มม. สามารถติดตั้งได้อย่างยืดหยุ่นในพื้นที่จำกัด


การตอบสนองที่รวดเร็ว ความแม่นยำสำหรับการควบคุมแรง

เวลาในการเคลื่อนที่แต่ละครั้งสั้นที่สุดเพียง 0.5 วินาที สามารถรับมือกับงานหนีบที่รวดเร็วได้ และส่วนท้ายสามารถเปลี่ยนได้ตลอดเวลา ลูกค้าสามารถปรับส่วนท้ายได้ตามความต้องการ
โหมดควบคุมหลากหลาย ใช้งานง่าย

การตั้งค่าของ Z-EFG-C50 นั้นง่าย มีโหมดควบคุมมากมาย รวมถึง 485 (Modbus RTU), Pulse, I/O และสามารถใช้งานร่วมกับระบบควบคุมหลัก PLC ได้

การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
1. ไฟแสดงสถานะ LED
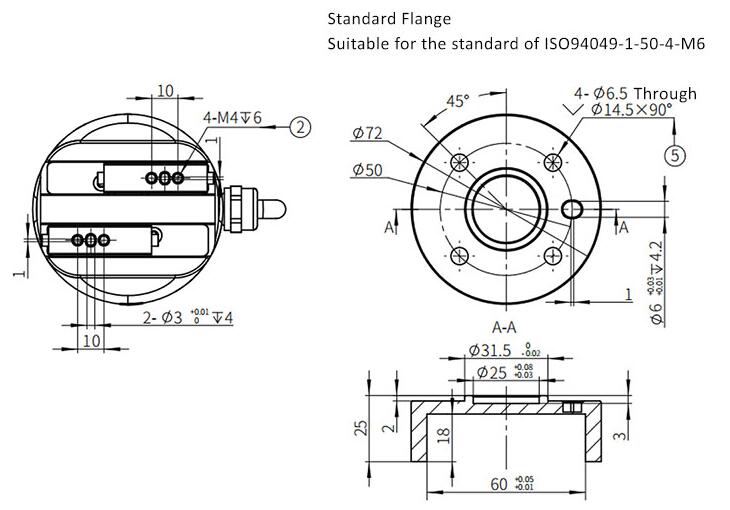
2. บริเวณติดตั้ง ให้ใช้สกรู M4 จำนวน 4 ตัว
3. ระยะชักของตัวจับยึดไฟฟ้าคือ 50 มม.
4. ช่องเสียบน็อต
5. ณ จุดติดตั้ง ให้ใช้สกรู M6 จำนวน 4 ตัว ยึดเข้ากับหน้าแปลนปลายแขนหุ่นยนต์ร่วมปฏิบัติงาน
ธุรกิจของเรา


หมวดหมู่สินค้า
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT มือจับไฟฟ้า SERIES – Z-EFG-12 Paral...