อุปกรณ์จับยึดหุ่นยนต์ร่วมปฏิบัติงาน – ISC Inner Soft Clamp Cobot Arm Gripper



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ / ตัวจับยึดแขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดแบบอ่อน / ตัวจับยึดแขนหุ่นยนต์
แอปพลิเคชัน

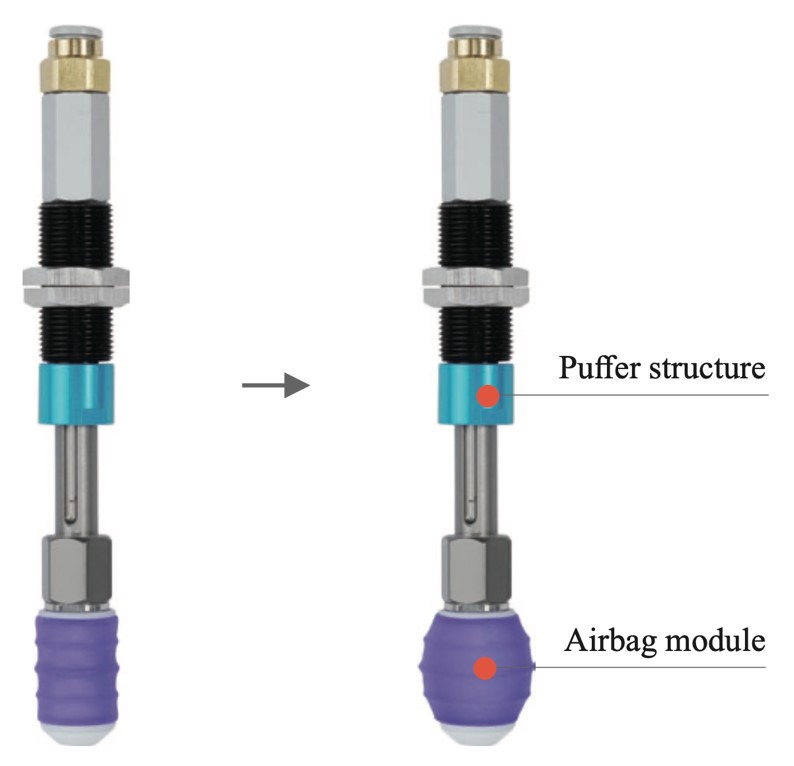
แคลมป์ยึดภายใน ISC เป็นอุปกรณ์ยึดแบบอ่อนนุ่มที่เป็นนวัตกรรมใหม่ ซึ่งออกแบบโดยเลียนแบบสรีระการป้องกันตัวของปลาปักเป้า โดยการเติมอากาศเข้าไปด้วยแรงดัน อุปกรณ์ยึดจะขยายตัวและยึดจับภายในได้อย่างสมบูรณ์
เนื่องจากส่วนที่สัมผัสกับชิ้นงานเป็นยางซิลิโคนอ่อนนุ่ม เมื่อเพิ่มแรงกด จะเกิดชั้น "เบาะอากาศ" ระหว่างส่วนรองรับที่แข็งแรงกับพื้นผิวสัมผัส ทำให้แรงกดกระจายตัวอย่างสม่ำเสมอและไม่น่าจะทำให้ชิ้นงานเสียหาย นอกจากนี้ ยังสามารถปรับแรงดันอากาศที่ป้อนเข้าไปเพื่อควบคุมการยืดตัวของถุงลมและแรงกดที่สัมผัสกับชิ้นงาน ทำให้ระบบจับยึดมีความนุ่มนวลมากขึ้นอย่างเห็นได้ชัด
คุณสมบัติ

• สื่อส่งเสริมการขับขี่: อากาศสะอาด
อายุการใช้งานมาตรฐาน: มากกว่า 100,000 ครั้ง
• ความถี่ในการทำงานสูงสุด (รอบต่อนาที): 300
● ตัวยึดภายในมีโครงสร้างถุงลมพิเศษและสามารถสร้างการเปลี่ยนรูปที่แตกต่างกันไปตามแรงดันภายใน
● ป้อนแรงดันบวก: อุปกรณ์จับยึดจะยืดออก ปรับการรองรับที่พื้นผิวด้านในของวัตถุโดยอัตโนมัติ และจับยึดวัตถุได้อย่างสมบูรณ์
● แรงดันลบขาเข้า: อุปกรณ์จะแสดงสภาวะธรรมชาติและปล่อยวัตถุออกมา
ตัวจับยึดแบบอ่อน SFG ได้ถูกนำไปใช้งานร่วมกับแขนหุ่นยนต์ร่วมปฏิบัติงานระดับโลก ซึ่งรวมถึง:

หุ่นยนต์แนวนอน 4 แกน (SCARA) เดลต้า
แขนหุ่นยนต์อุตสาหกรรม Nachi Fujikoshi
หุ่นยนต์ขนาน 4 แกน (เดลต้า) ของ ABB
หุ่นยนต์ร่วมปฏิบัติงาน 6 แกน UR
หุ่นยนต์ร่วมปฏิบัติงาน 6 แกน AUBO
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
แคลมป์ยึดภายในแบบถุงลม ISC เป็นอุปกรณ์จับยึดแบบอ่อนนุ่มที่เป็นนวัตกรรมใหม่ ออกแบบโดยเลียนแบบสัญชาตญาณการป้องกันตัวของปลาปักเป้า โดยการเติมอากาศเข้าไปด้วยแรงดัน อุปกรณ์จับยึดจะขยายตัวและยึดจับชิ้นงานจากภายในได้ เนื่องจากสามารถควบคุมแรงดันอากาศที่ป้อนเข้าไปได้อย่างแม่นยำ แรงยึดจับระหว่างอุปกรณ์จับยึดกับชิ้นงานจึงสามารถควบคุมได้ ทำให้ไม่เกิดความเสียหายกับชิ้นงานได้ง่าย
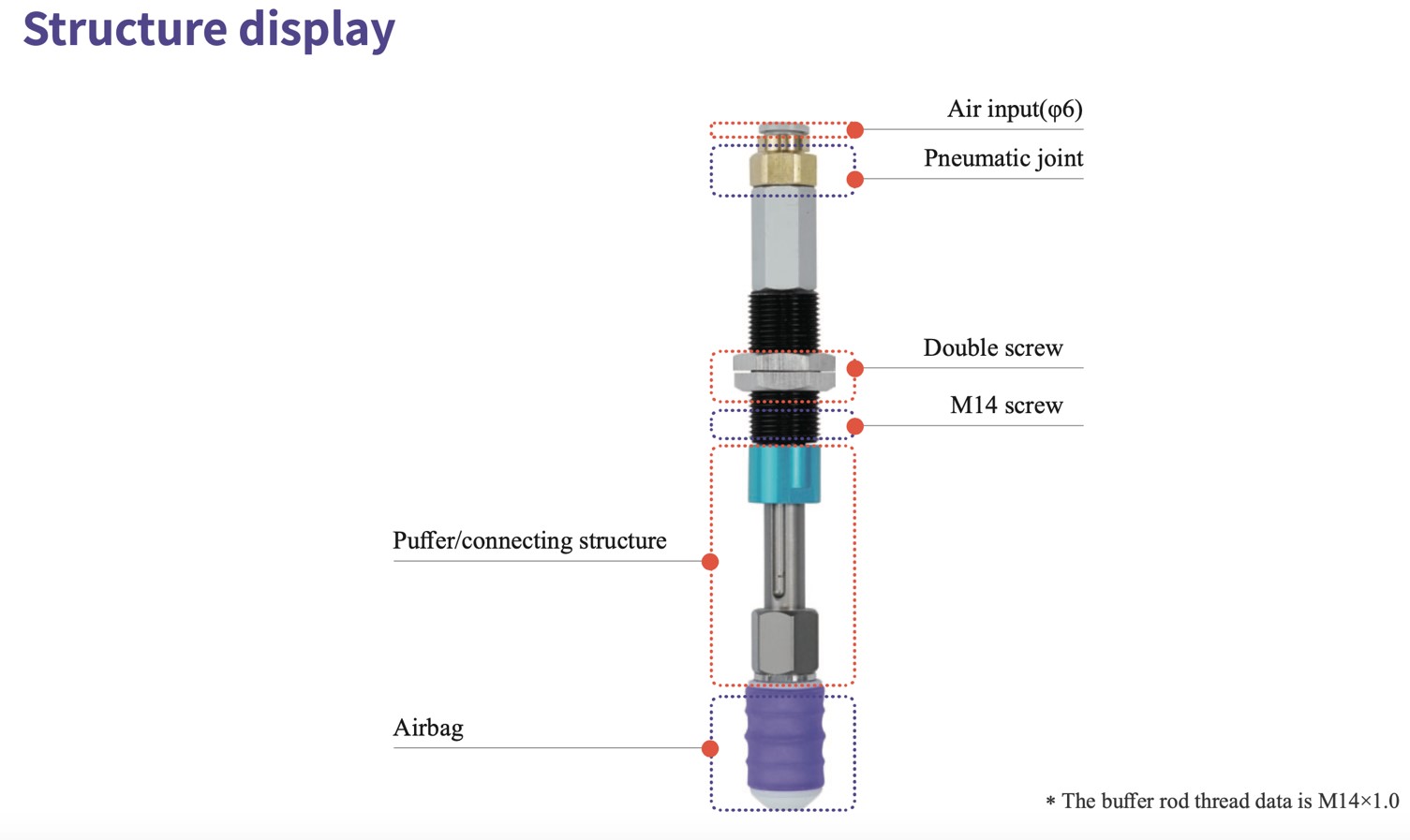
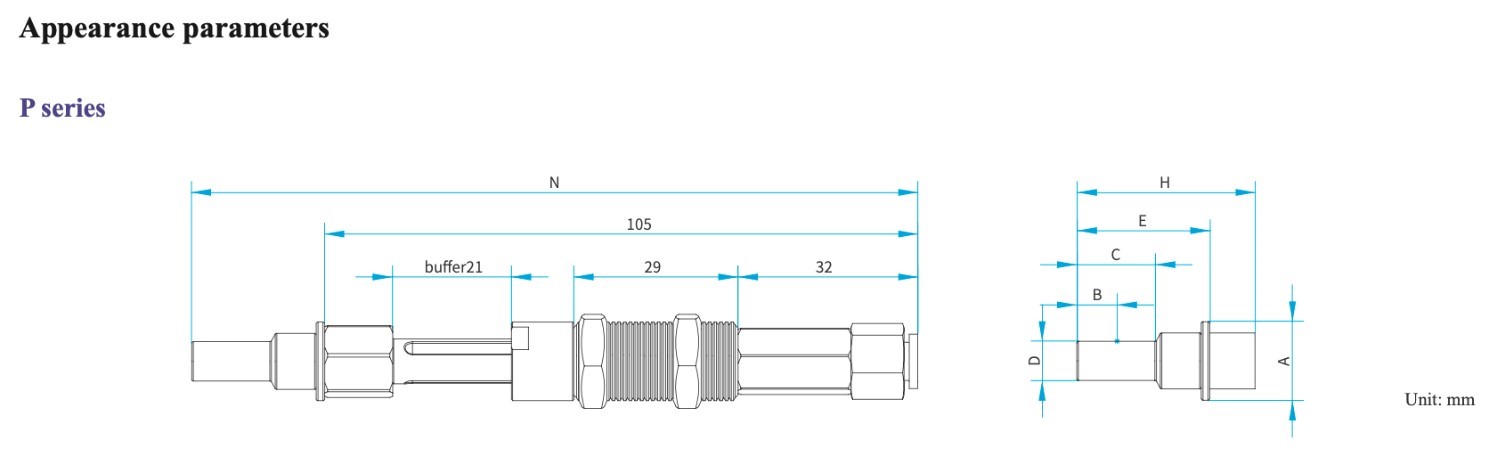
| แบบอย่าง | ความสูงทั้งหมดของโมดูลถุงลมนิรภัย H | เส้นผ่านศูนย์กลางพื้นผิวสัมผัส D | เส้นผ่านศูนย์กลางของชิ้นส่วนโครงสร้าง A | ความสูงจากเส้นผ่านศูนย์กลางใช้งานถึงด้านล่าง B | ความสูงของพื้นผิวสัมผัสที่มีประสิทธิภาพ C | ความสูงในการทำงานของถุงลมนิรภัย โมดูล E | ความยาวทั้งหมด N |
| ไอเอสซี-พี4.5อี | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | อี+105 |
| ไอเอสซี-พี5อี | 27.5 | 5 | 14 | 5 | 10 | 19.5 | อี+105 |
| ไอเอสซี-พี6อี | 30.5 | 6 | 14 | 6 | 12 | 22.5 | อี+105 |
| ไอเอสซี-พี7อี | 31.5 | 7 | 14 | 7 | 14 | 23.5 | อี+105 |
| ไอเอสซี-พี8อี | 31.5 | 8 | 14 | 7 | 14 | 23.5 | อี+105 |
| ไอเอสซี-พี9อี | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | อี+105 |
| ไอเอสซี-พี10อี | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | อี+105 |
| ไอเอสซี-พี11อี | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | อี+105 |
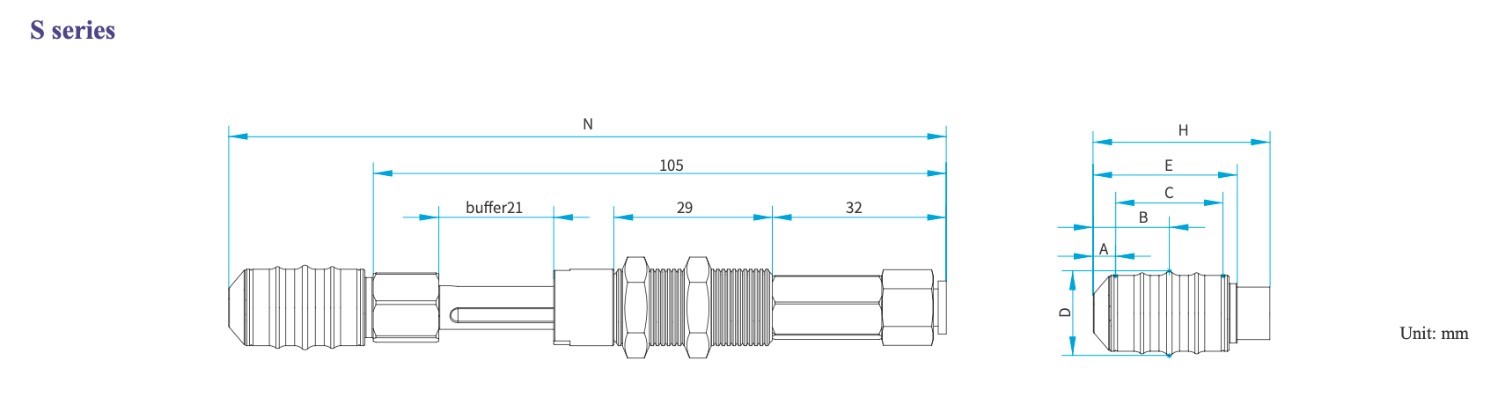
| แบบอย่าง | ความสูงทั้งหมดของโมดูลถุงลมนิรภัย H | เส้นผ่านศูนย์กลางพื้นผิวสัมผัส D | ความสูงนำทาง A | ความสูงจากเส้นผ่านศูนย์กลางใช้งานถึงด้านล่าง B | ความสูงของพื้นผิวสัมผัสที่มีประสิทธิภาพ C | ความสูงในการทำงานของถุงลมนิรภัย โมดูล E | ความยาวทั้งหมด N |
| ไอเอสซี-เอส14อี | 32.5 | 14 | 4 | 14 | 20 | 26.5 | อี+105 |
| ไอเอสซี-เอส15.5อี | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | อี+105 |
| ไอเอสซี-เอส18อี | 40.5 | 18 | 6 | 19 | 26 | 34.5 | อี+105 |
| ไอเอสซี-เอส20.5อี | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | อี+105 |
| ไอเอสซี-เอส23อี | 40.5 | 23 | 6 | 19 | 26 | 34.5 | อี+105 |
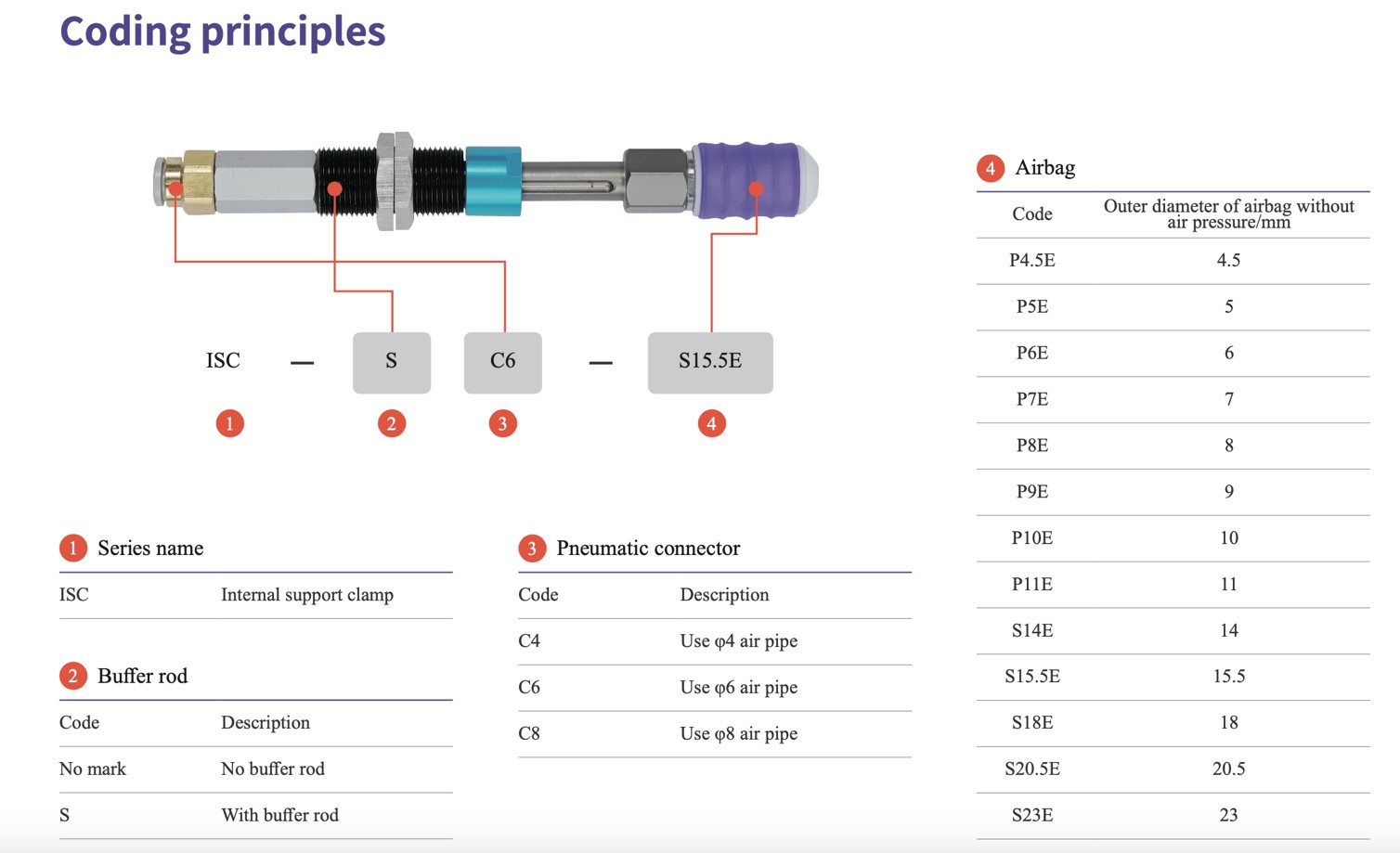
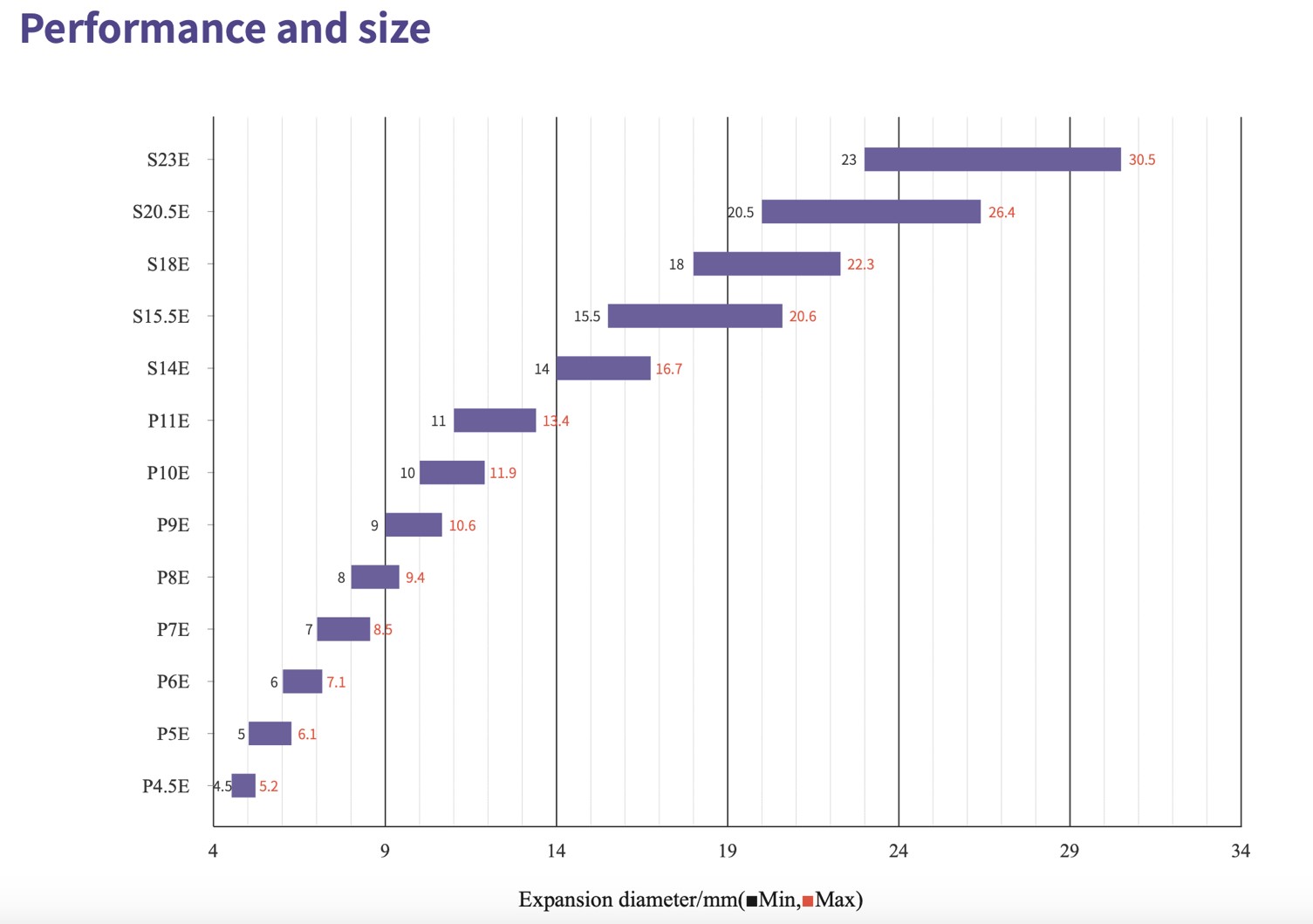
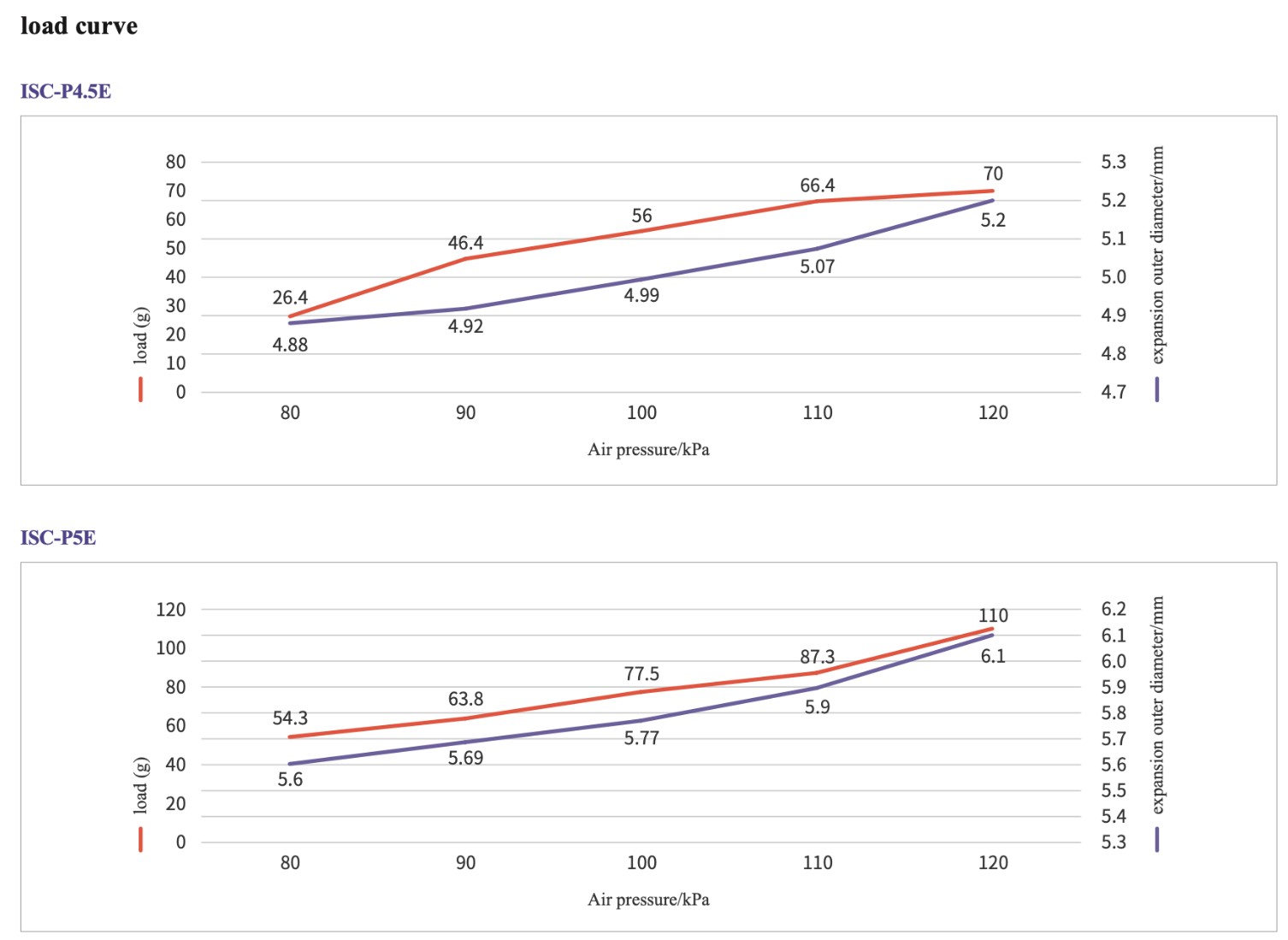
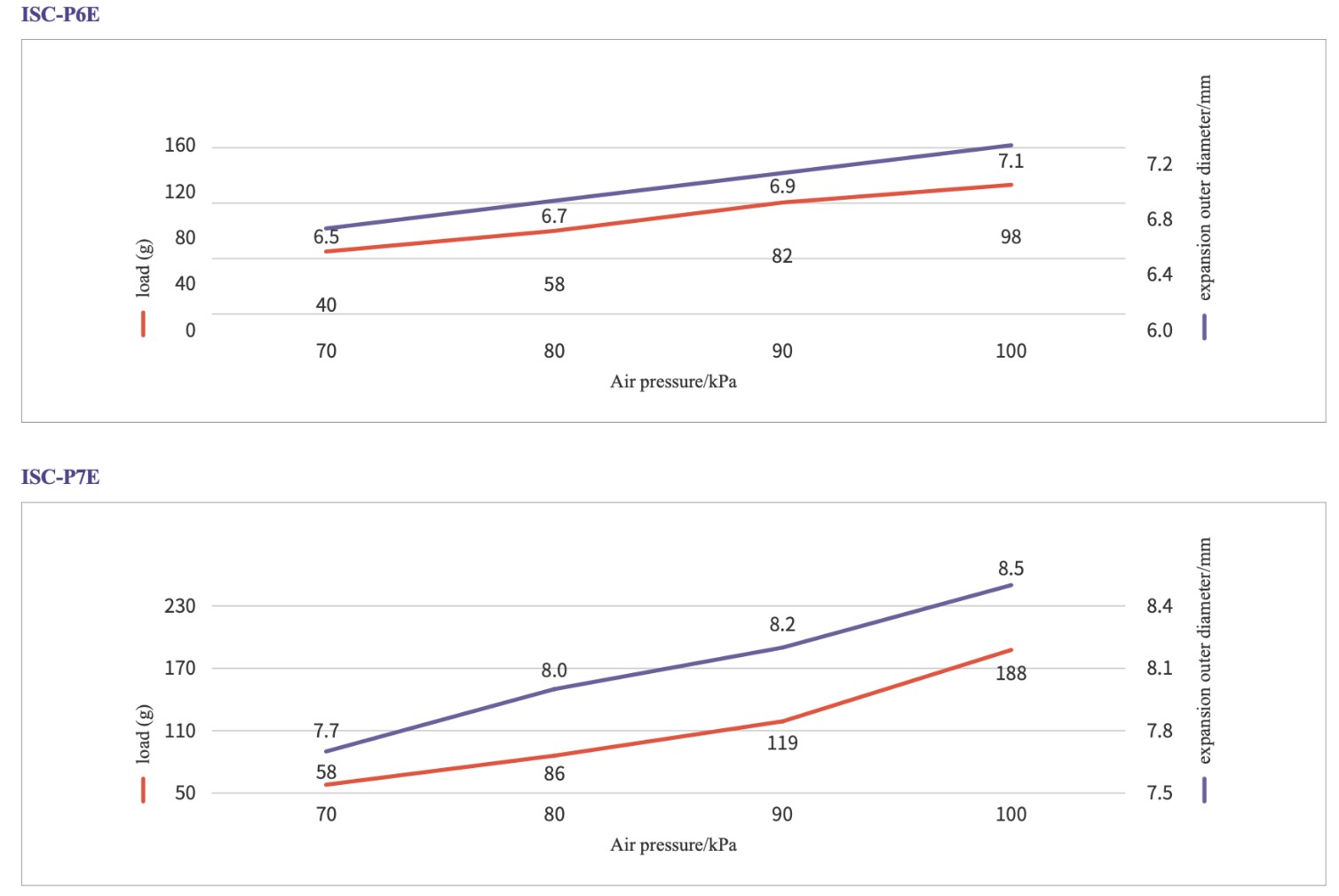
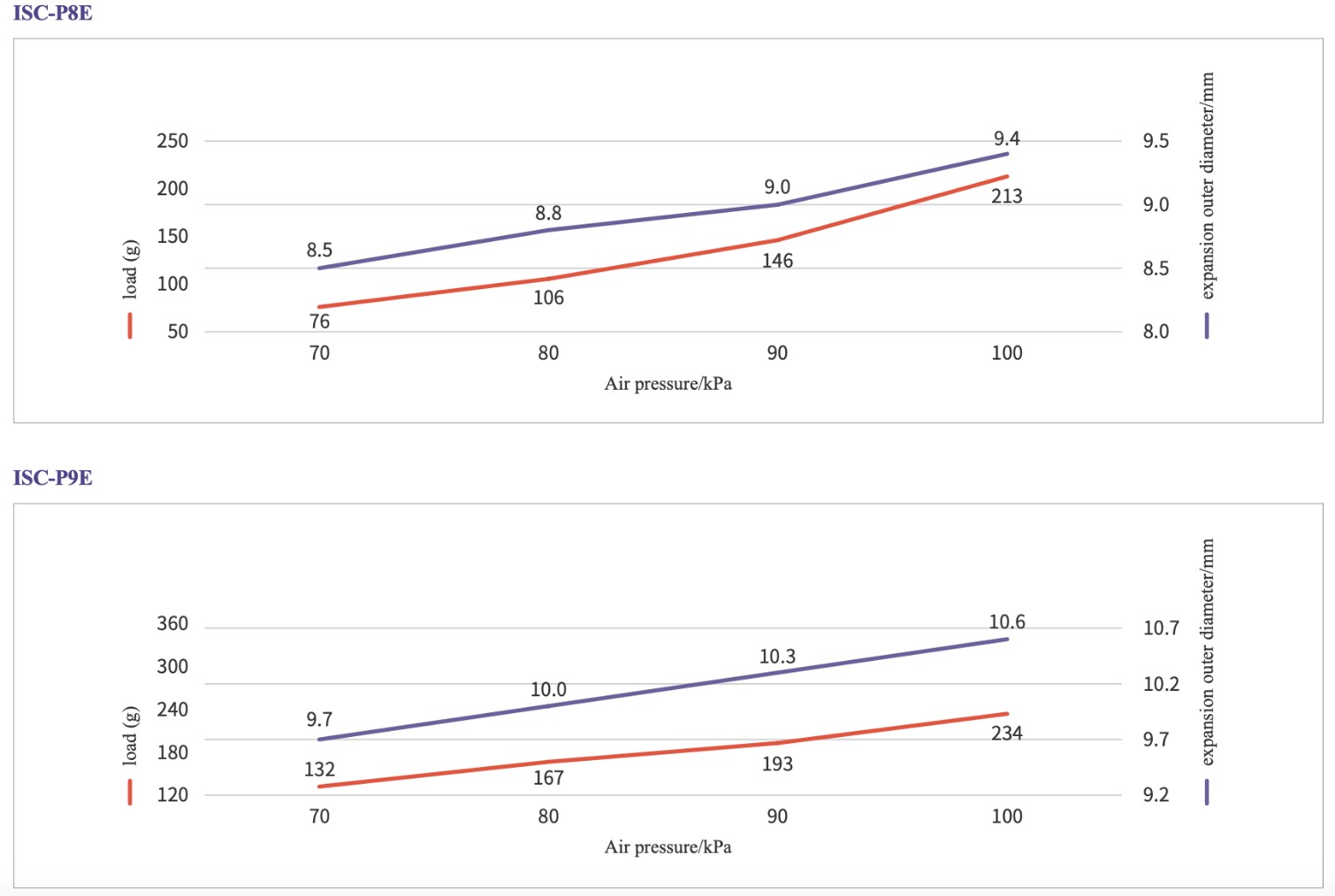
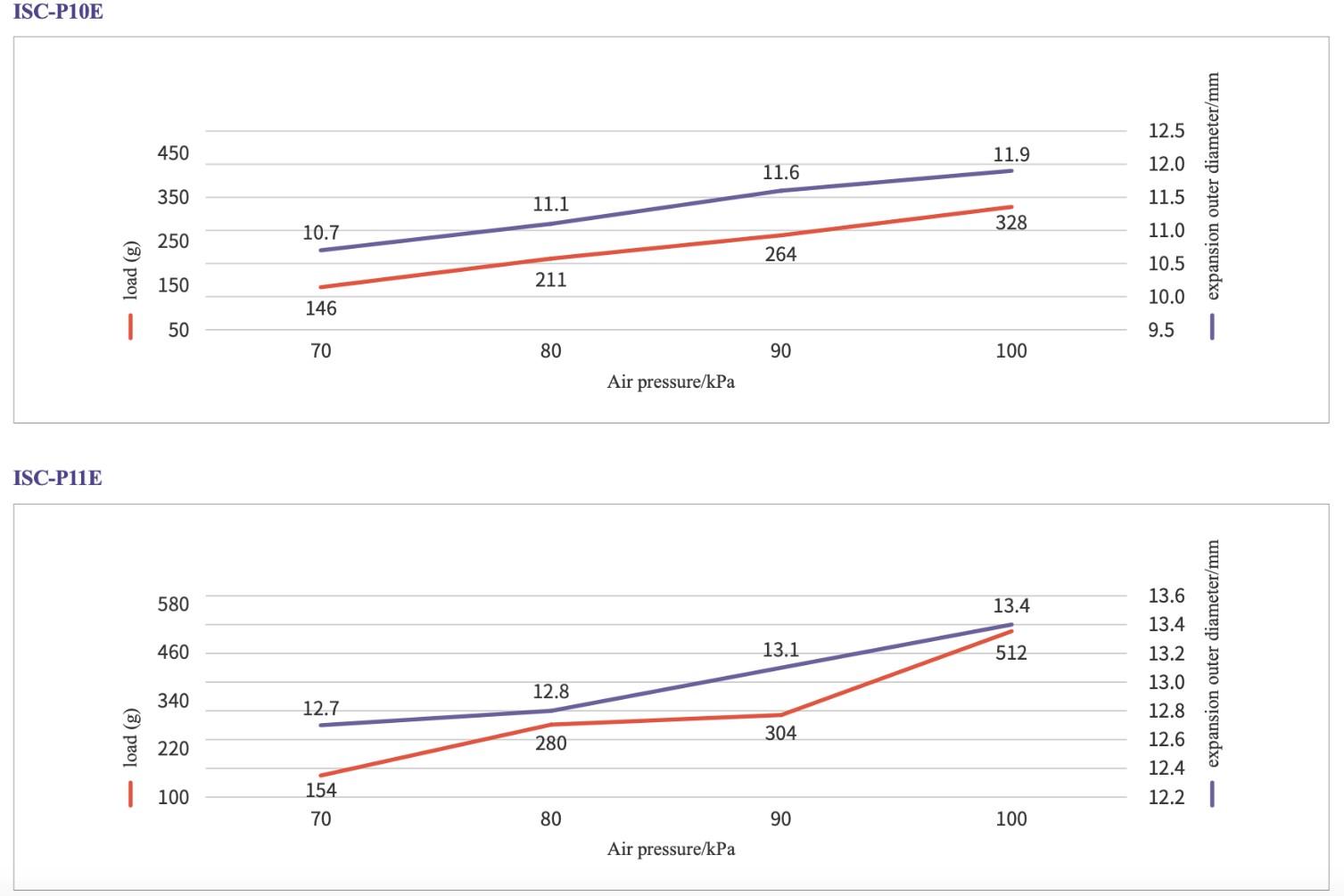
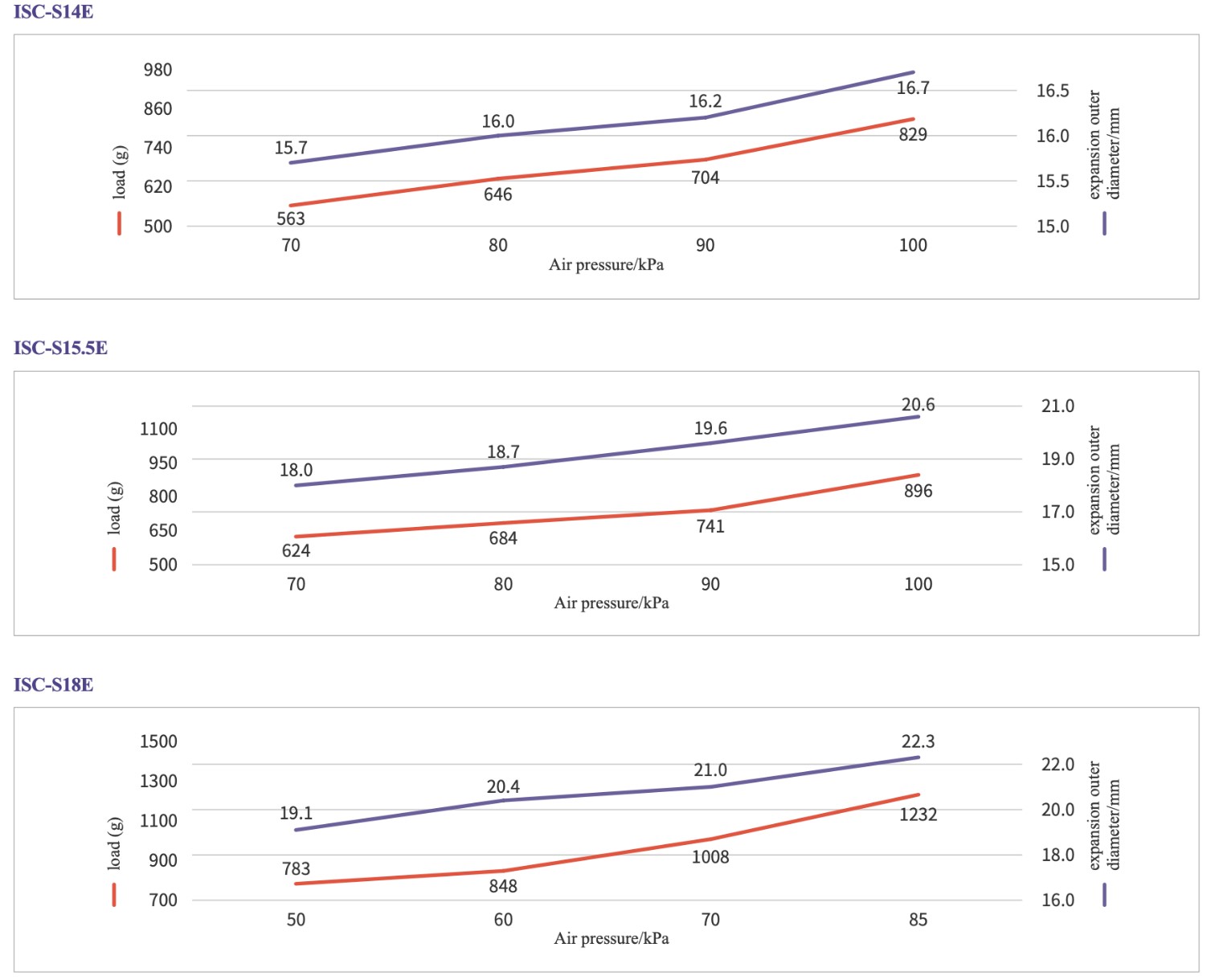
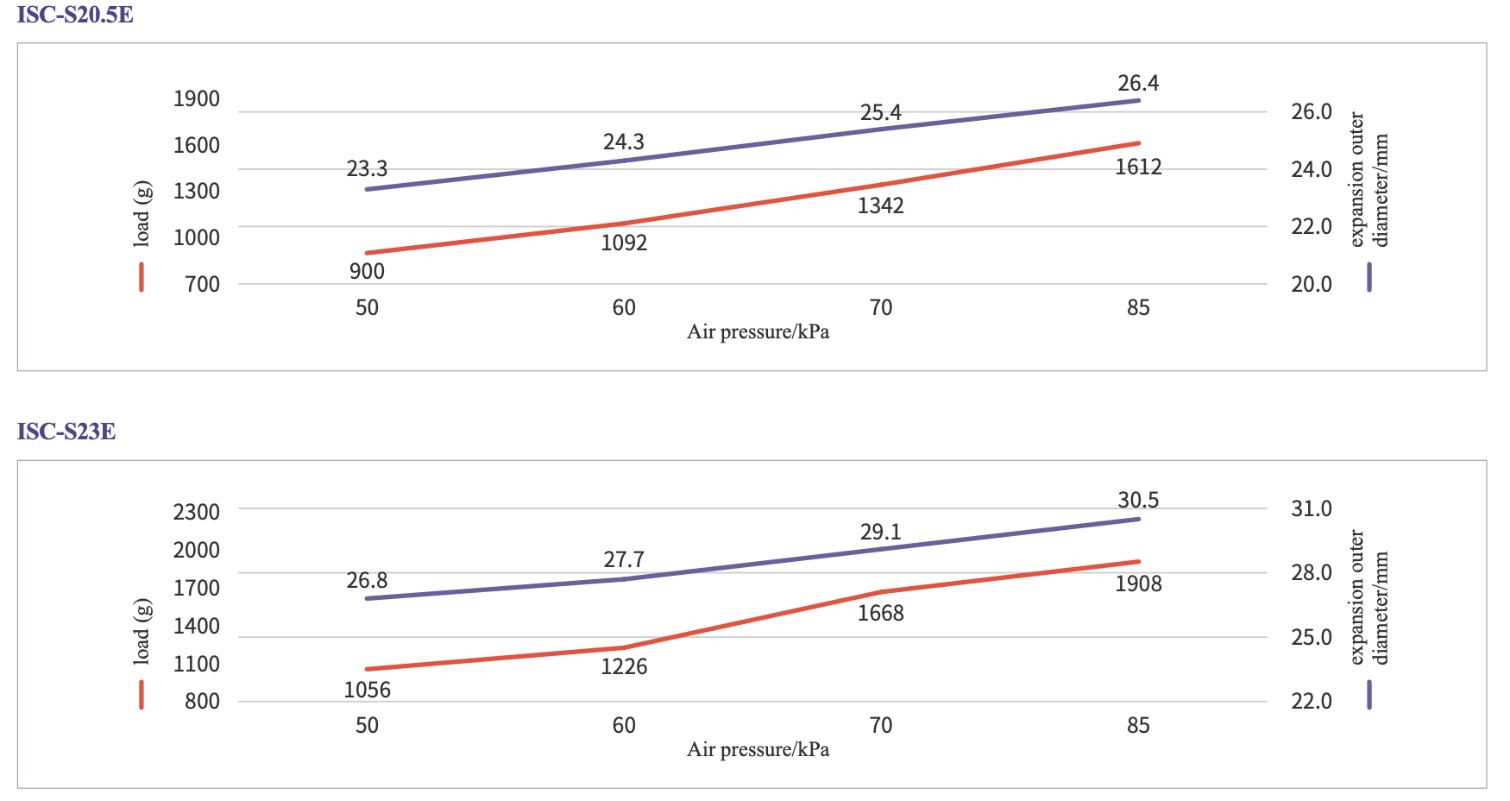
เส้นผ่านศูนย์กลางภายนอกที่ขยายออก
| แบบอย่าง | ช่วงแรงดันใช้งาน /kPa | เส้นผ่านศูนย์กลางภายนอกที่ขยายตัวสูงสุด/มม. | โหลดสูงสุด/กรัม | น้ำหนักของอุปกรณ์/กรัม | แบบจำลองแท่งโลหะ | ขนาดรูยึด/มม. |
| ไอเอสซี-เอสซี6-พี4.5อี | 0-120 | 5.2 | 70 | 36 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี5อี | 0-120 | 6.1 | 110 | 36 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี6อี | 0-100 | 7.1 | 98 | 36 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี7อี | 0-100 | 8.5 | 188 | 36 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี8อี | 0-100 | 9.4 | 213 | 36 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี9อี | 0-100 | 10.6 | 234 | 37 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี10อี | 0-100 | 11.9 | 328 | 37 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-พี11อี | 0-100 | 13.4 | 512 | 38 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-เอส14อี | 0-100 | 16.7 | 829 | 42 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-เอส15.5อี | 0-100 | 20.6 | 896 | 42 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-เอส18อี | 0-85 | 22.3 | 1232 | 47 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-เอส20.5อี | 0-85 | 26.4 | 1612 | 49 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
| ไอเอสซี-เอสซี6-เอส23อี | 0-85 | 30.5 | 1908 | 51 | วีเอฟเอ็นที 1421-จี18 | 14.5 |
* รุ่น P มีเส้นผ่านศูนย์กลางภายนอกสูงสุดที่รับน้ำหนักได้ +0.3 มม. รุ่น S มีเส้นผ่านศูนย์กลางภายนอกสูงสุดที่รับน้ำหนักได้ +1 มม. การทดสอบรับน้ำหนักวัดด้วยเครื่องมือระดับมืออาชีพ
ธุรกิจของเรา


หมวดหมู่สินค้า
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...
-

เครื่องมือจับชิ้นงานไฟฟ้า HITBOT รุ่น Z-EFG-13...
-

ชุดเปลี่ยนเร็ว – QCA-200-D1 เปลี่ยนเร็ว...
-

ชุดเปลี่ยนเลนส์แบบรวดเร็ว – QC-200 แบบกลม คู่มือการใช้งาน...
-

ชุดเปลี่ยนเร็ว – QCA-S100 ชุดเปลี่ยนเร็ว...
-

ชุดเปลี่ยนเลนส์แบบรวดเร็ว – QCA-S500 ชุดเปลี่ยนเลนส์แบบรวดเร็ว...