ชุดจับชิ้นงานไฟฟ้า HITBOT – รุ่น Z-ECG-20 จับชิ้นงานไฟฟ้าแบบสามนิ้ว



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน

คุณสมบัติ

·การตรวจจับการตกของแคลมป์ ฟังก์ชันเอาต์พุตพื้นที่
·ควบคุมแรง ตำแหน่ง และความเร็วได้อย่างแม่นยำผ่าน Modbus
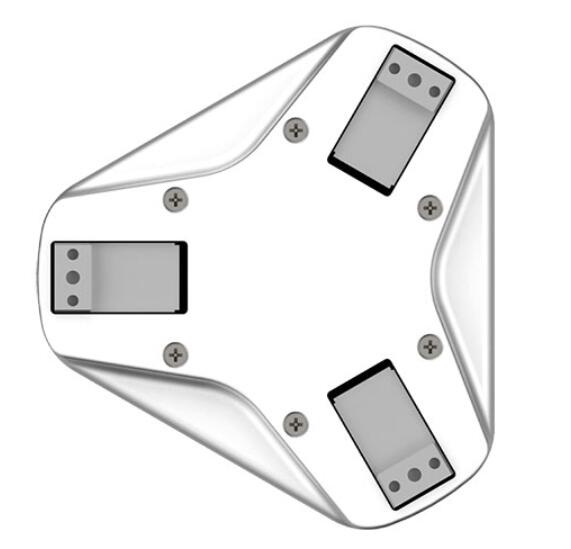
·ที่จับตรงกลางแบบสามนิ้ว
·ตัวควบคุมในตัว: ขนาดกะทัดรัด ผสานรวมได้ง่าย
·โหมดควบคุม: 485 (Modbus RTU), อินพุต/เอาต์พุต
เครื่องจับยึดไฟฟ้าแบบสามขากรรไกร หนีบวัตถุทรงกระบอกได้ง่าย
ประสิทธิภาพสูง
แรงยึด: 30-80 นิวตัน
ความหนาแน่นพลังงานสูง
บิ๊กสโตรก
ระยะชักทั้งหมด: 20 มม. (ปรับได้)
การควบคุมความแม่นยำ
ถูกควบคุมโดย Modbus
ตัวควบคุมถูกติดตั้งมาในตัว
พื้นที่ใช้งานน้อย ติดตั้งง่าย
รวดเร็วและมีประสิทธิภาพสูง
ความแม่นยำในการวัดซ้ำ: ±0.03 มม.
จังหวะเดียว: 0.5 วินาที
คีมจับ 3 ขา
ที่หนีบ 3 ขา เหมาะสำหรับใช้งานในหลากหลายโอกาส

ผลิตภัณฑ์ที่เกี่ยวข้อง


พารามิเตอร์ข้อมูลจำเพาะ
| รุ่นหมายเลข Z-ECG-20 | พารามิเตอร์ |
| ทั้งหมด จังหวะ | 20 มม. (ปรับได้) |
| แรงยึดจับ | 30-80N (ปรับได้) |
| ความสามารถในการทำซ้ำ | ±0.03 มม. |
| น้ำหนักการจับที่แนะนำ | น้ำหนักสูงสุด 1 กก. |
| การแพร่เชื้อ โหมด | เฟืองและรางนำลูกปืน + รางนำลูกปืน |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.5 วินาที |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80(ไม่มีน้ำค้างแข็ง) |
| เวลาที่สั้นที่สุดสำหรับการตีครั้งเดียว | 0.5 วินาที |
| การควบคุมจังหวะ | ปรับได้ |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 1.5 กก. |
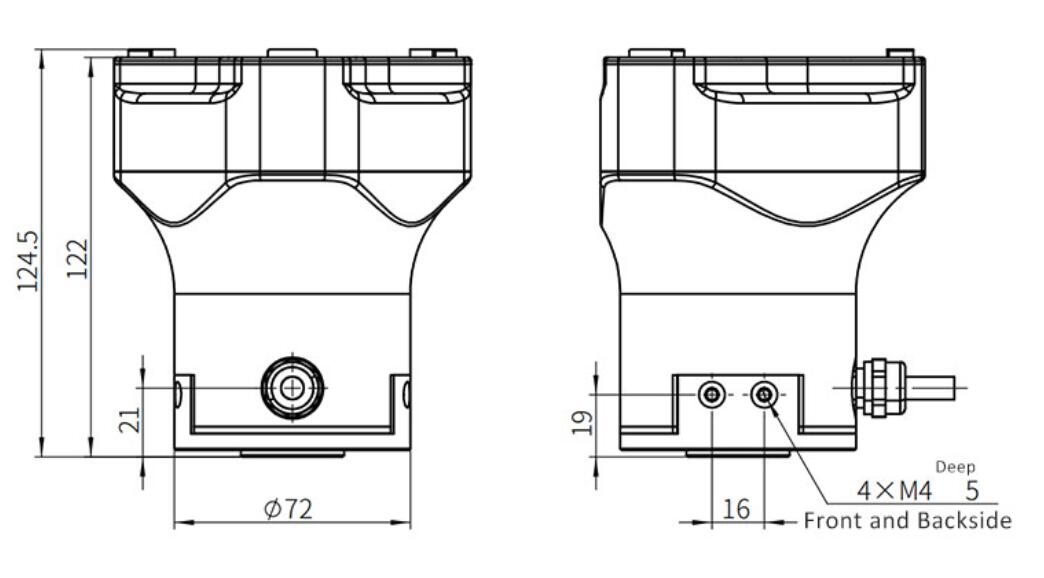
| มิติ(ล*ว*ฮ) | 114*124.5*114 มม. |
| ระดับ IP | IP54 |
| ประเภทมอเตอร์ | มอเตอร์เซอร์โว |
| กระแสสูงสุด | 2A |
| แรงดันไฟฟ้าที่กำหนด | 24V ±10% |
| กระแสไฟสแตนด์บาย | 0.8เอ |
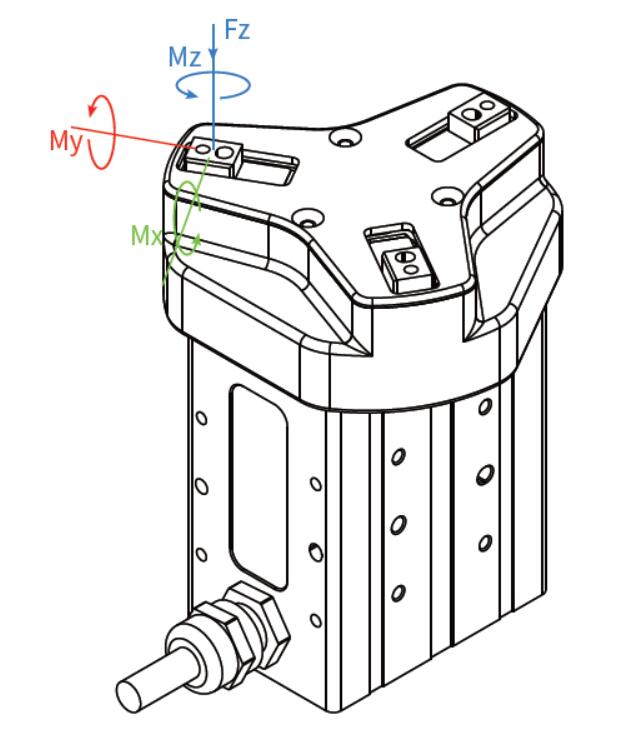
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 150N |
| แรงบิดที่อนุญาต | |
| มx: | 1.5 นิวตันเมตร |
| ของฉัน: | 1.5 นิวตันเมตร |
| มz: | 1.5 นิวตันเมตร |
ความแม่นยำในการกำหนดตำแหน่งด้วยเครื่องจับยึดสามนิ้ว
ตัวจับยึดไฟฟ้าแบบ 3 ขา มีความแม่นยำในการทำซ้ำ ±0.03 มม. โดยใช้แคลมป์แบบ 3 ขา มีฟังก์ชันการทดสอบการตกกระแทกและการส่งออกส่วน ซึ่งสามารถจัดการกับงานจับยึดวัตถุทรงกระบอกได้ดียิ่งขึ้น

ตัวควบคุมในตัว ผสานรวมได้สูง
ระยะชักสามารถปรับได้ 20 มม. แรงหนีบสามารถปรับได้ 30-80 นิวตัน โดยใช้ระบบส่งกำลังแบบเฟืองแร็ค + รางนำลูกบอล มีตัวควบคุมในตัว สามารถควบคุมแรงหนีบและความเร็วได้
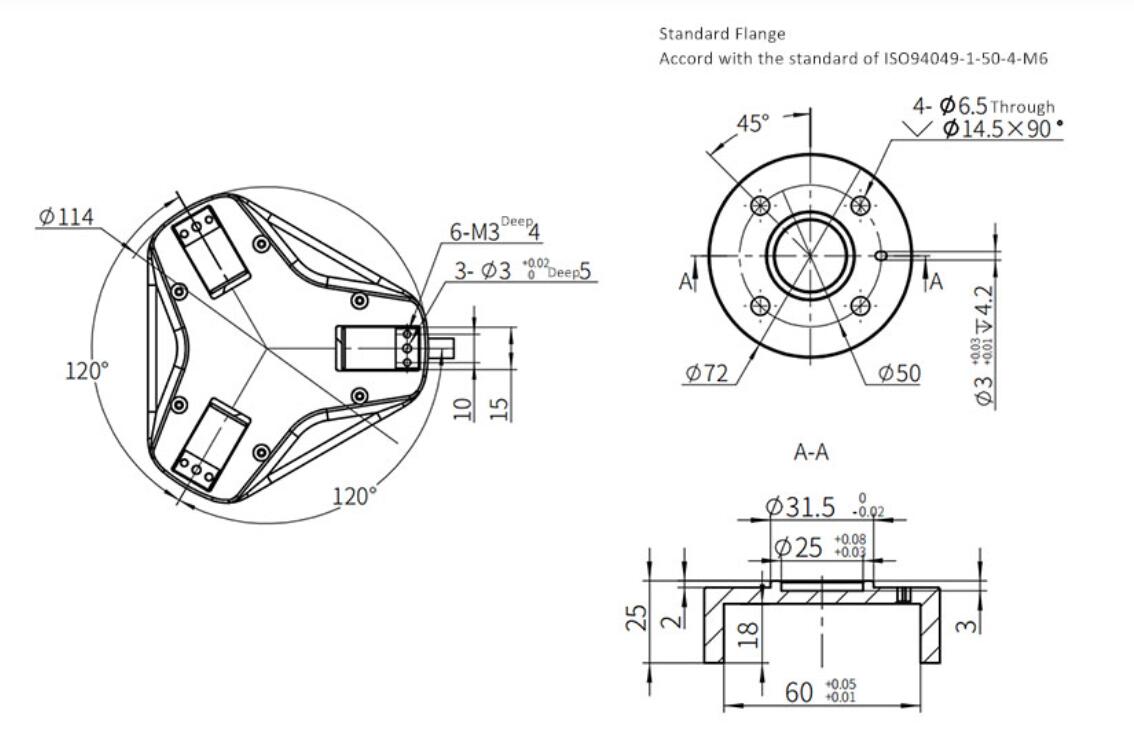
ขนาดเล็ก ติดตั้งง่าย

Z-ECG-20 มีขนาด L114*W124.5*H114 มม. น้ำหนักเพียง 0.65 กก. โครงสร้างกะทัดรัด รองรับการติดตั้งได้หลากหลายรูปแบบ และง่ายต่อการจัดการกับงานหนีบต่างๆ


ตอบสนองฉับไว แม่นยำ ควบคุมกำลังได้

ตัวจับยึดไฟฟ้ามีฟังก์ชันการจับยึดเพื่อทดสอบการตกกระแทกและการแยกส่วน น้ำหนัก 1.5 กก. กันน้ำระดับ IP20 แนะนำให้จับยึดน้ำหนักไม่เกิน 1 กก. และสามารถจับยึดได้อย่างแม่นยำสูง
โหมดควบคุมหลากหลาย ใช้งานง่าย

ตัวจับยึดไฟฟ้า Z-ECG-20 สามารถควบคุมได้อย่างแม่นยำด้วยระบบ Modbus การกำหนดค่าตัวจับยึดนั้นง่าย โดยใช้โปรโตคอล Digital I/O เพียงแค่ใช้สายเคเบิลเส้นเดียวในการเชื่อมต่อ ON/OFF นอกจากนี้ยังสามารถใช้งานร่วมกับระบบควบคุมหลัก PLC ได้อีกด้วย

การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
ธุรกิจของเรา







