ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-100 แบบ Y-type

หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

• จังหวะการตีที่ใหญ่
• แรงหนีบและระยะการเคลื่อนที่สามารถปรับได้
• อายุการใช้งานยาวนาน: หลายสิบล้านรอบการใช้งาน เหนือกว่ากรงเล็บอากาศ
• ตัวควบคุมในตัว: ขนาดเล็ก ติดตั้งง่าย
·การควบคุมบัส EIA485
ระยะชักยาว 100 มม. แรงหนีบและระยะชักปรับได้
จังหวะยาว
ระยะชักรวมสูงสุดอยู่ที่ 100 มม.
โหมดควบคุม
485 การสื่อสาร, EIA485 การควบคุมทางหลวงหลัก
เสียบปลั๊กแล้วใช้งานได้เลย
สามารถใช้งานร่วมกับแขนหุ่นยนต์ทั่วไปได้อย่างง่ายดาย
ตัวควบคุมในตัว
ใช้พื้นที่น้อย สะดวกในการติดตั้งใช้งาน
ความแม่นยำในการควบคุม
ความแม่นยำในการวัดซ้ำ: ±0.02 มม.
การหนีบแบบอ่อน
มันสามารถหนีบวัตถุที่เปราะบางได้

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
ตัวจับยึดแบบแขนกล Z-EFG-100 มีความแม่นยำสูง รองรับการจับยึดแบบเบา และสามารถจับวัตถุที่เปราะบางได้ง่าย เช่น ท่อ ไข่ เป็นต้น ซึ่งไม่สามารถทำได้ด้วยตัวจับยึดแบบใช้ลม
●ภาวะหลอดเลือดสมองตีบขนาดใหญ่
●การควบคุมสายไฟตามมาตรฐาน EIA485
●ปรับตัวให้เข้ากับแขนหุ่นยนต์หลากหลายประเภท
| รุ่นหมายเลข Z-EFG-100 | พารามิเตอร์ |
| ทั้งหมด จังหวะ | 90 มม. |
| แรงยึดจับ | 35-60N |
| ความสามารถในการทำซ้ำ | ±0.02 มม. |
| น้ำหนักการจับที่แนะนำ | 0.5 กก. |
| การแพร่เชื้อ โหมด | น็อตเกลียว + ข้อต่อ |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 1s |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80(ไม่มีน้ำค้างแข็ง) |
| โหมดการเคลื่อนไหว | การเชื่อมโยง |
| การควบคุมจังหวะ | ปรับได้ |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 0.925 กก. |
| มิติ(ล*ว*ฮ) | 203*144*45 มม. (เมื่อกางออก) 222*64*45 มม. (เมื่อพับเก็บ) |
| การวางตำแหน่งตัวควบคุม | ในตัว |
| พลัง | 30 วัตต์ |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| กระแสสูงสุด | 1.5A |
| แรงดันไฟฟ้าที่กำหนด | 24 โวลต์ |
| กระแสไฟสแตนด์บาย | 0.2เอ |
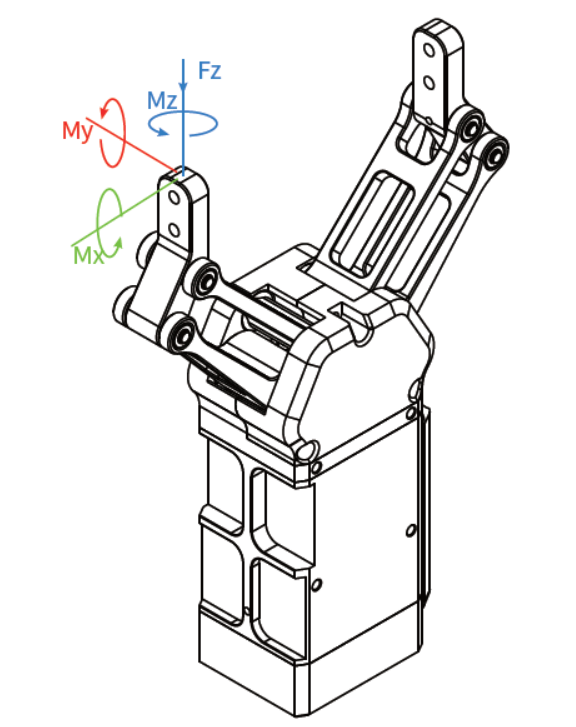
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 150N |
| แรงบิดที่อนุญาต | |
| มx: | 2 นิวตันเมตร |
| ของฉัน: | 1.5 นิวตันเมตร |
| มz: | 1.5 นิวตันเมตร |
เสียบปลั๊กแล้วใช้งานได้ทันที สะดวกในการติดตั้ง
เพื่อรองรับการใช้งานร่วมกับแขนหุ่นยนต์ร่วมปฏิบัติงานทั่วไปได้อย่างง่ายดาย ตัวจับยึดไฟฟ้าจึงมีระบบเซอร์โวในตัว เพียงแค่มีอุปกรณ์ที่สามารถใช้งานร่วมกับปั๊มลม + ตัวกรอง + วาล์วแม่เหล็กไฟฟ้า + วาล์วควบคุมการไหล + ตัวจับยึดลม ก็เพียงพอแล้ว

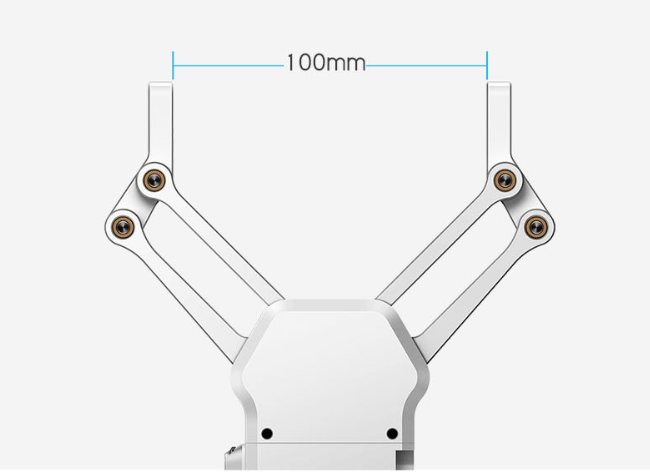
ระยะชักยาว เข้ากันได้ดีเยี่ยม
ระยะการเคลื่อนที่ที่มีประสิทธิภาพของ Z-EFG-100 สามารถยาวได้สูงสุด 100 มม. ขนาดการเปิด/ปิดอยู่ที่ 10 มม. ผลิตภัณฑ์นี้สามารถใช้ได้กับชิปเซมิคอนดักเตอร์ ผลิตภัณฑ์ดิจิทัล 3C ยานยนต์ และเครื่องใช้ในครัวเรือน เป็นต้น
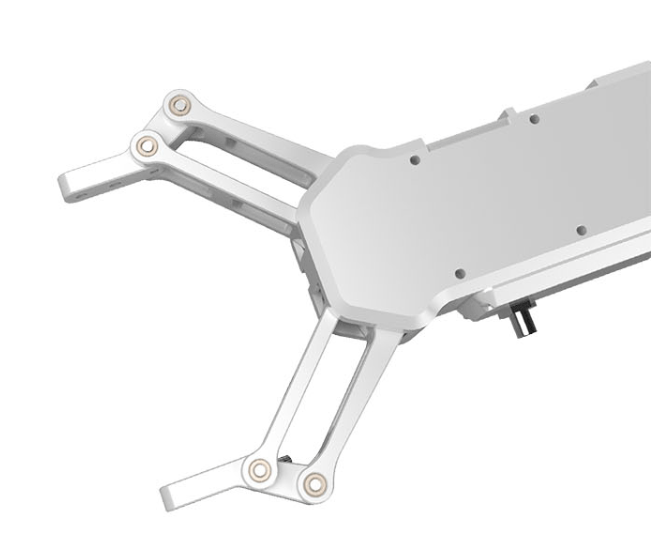
ขนาดเล็ก พกพาสะดวก

ขนาดของ Z-EFG-100 คือ ยาว 203 * กว้าง 144 * สูง 45 มม. โครงสร้างกะทัดรัด รองรับโหมดการติดตั้งได้หลากหลาย มีตัวควบคุมในตัว ใช้พื้นที่น้อย สามารถตอบสนองงานจับยึดได้หลากหลายประเภท


ปรับตัวเข้ากับแคลมป์ได้เอง ส่วนหางสามารถเปลี่ยนได้

ตัวจับยึดไฟฟ้า Z-EFG-100 รองรับการจับยึดแบบปรับได้เอง เหมาะสำหรับวัตถุรูปทรงกลม ทรงลูกบอล หรือรูปทรงผิดปกติ สามารถเปลี่ยนส่วนหางได้ง่าย ลูกค้าสามารถจับยึดวัตถุได้ตามต้องการ
การควบคุมแรงที่แม่นยำ

ตัวจับยึดไฟฟ้า Z-EFG-100 ใช้การออกแบบระบบส่งกำลังและการชดเชยการคำนวณการขับเคลื่อนแบบพิเศษ แรงจับยึดสามารถปรับได้อย่างต่อเนื่องตั้งแต่ 35N ถึง 60N และมีความแม่นยำในการทำซ้ำสูงถึง ±0.02 เมตร
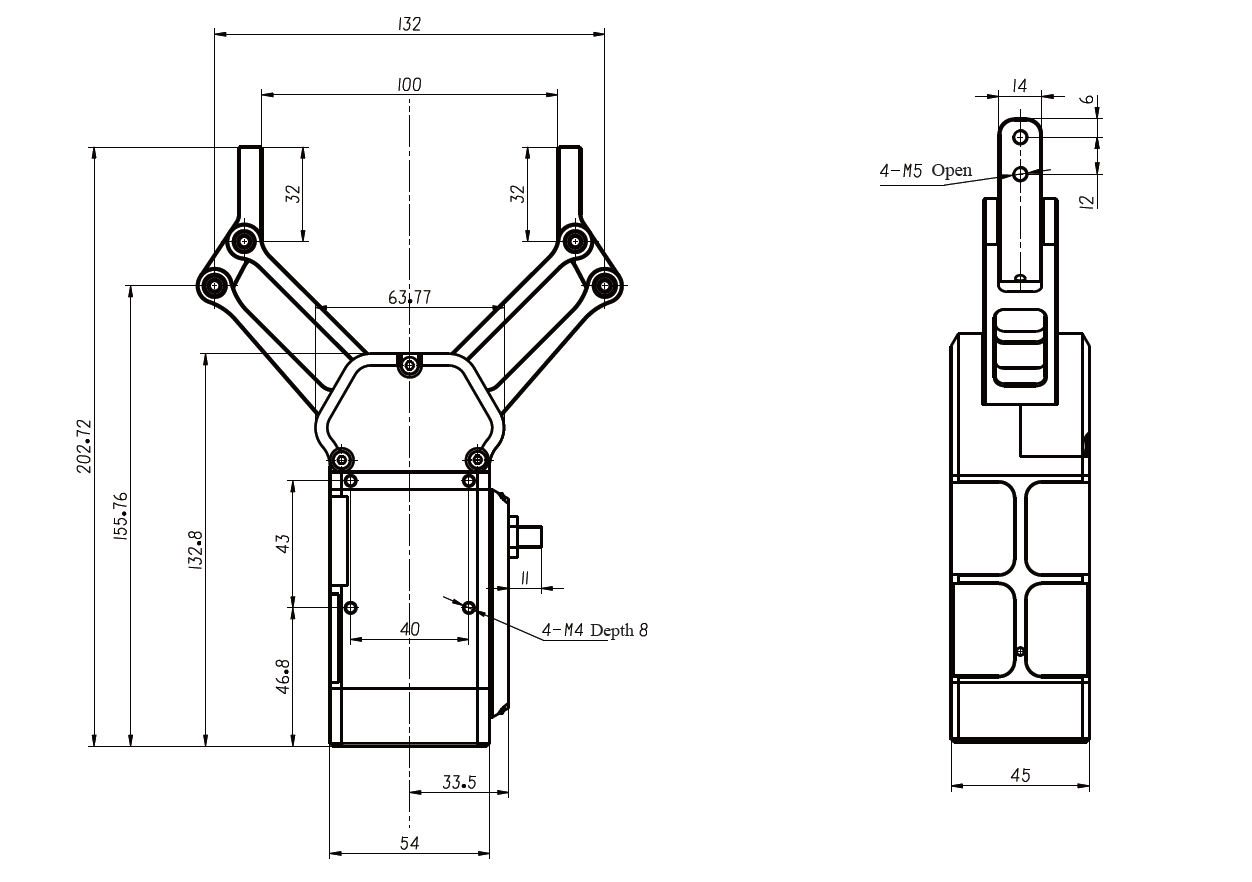
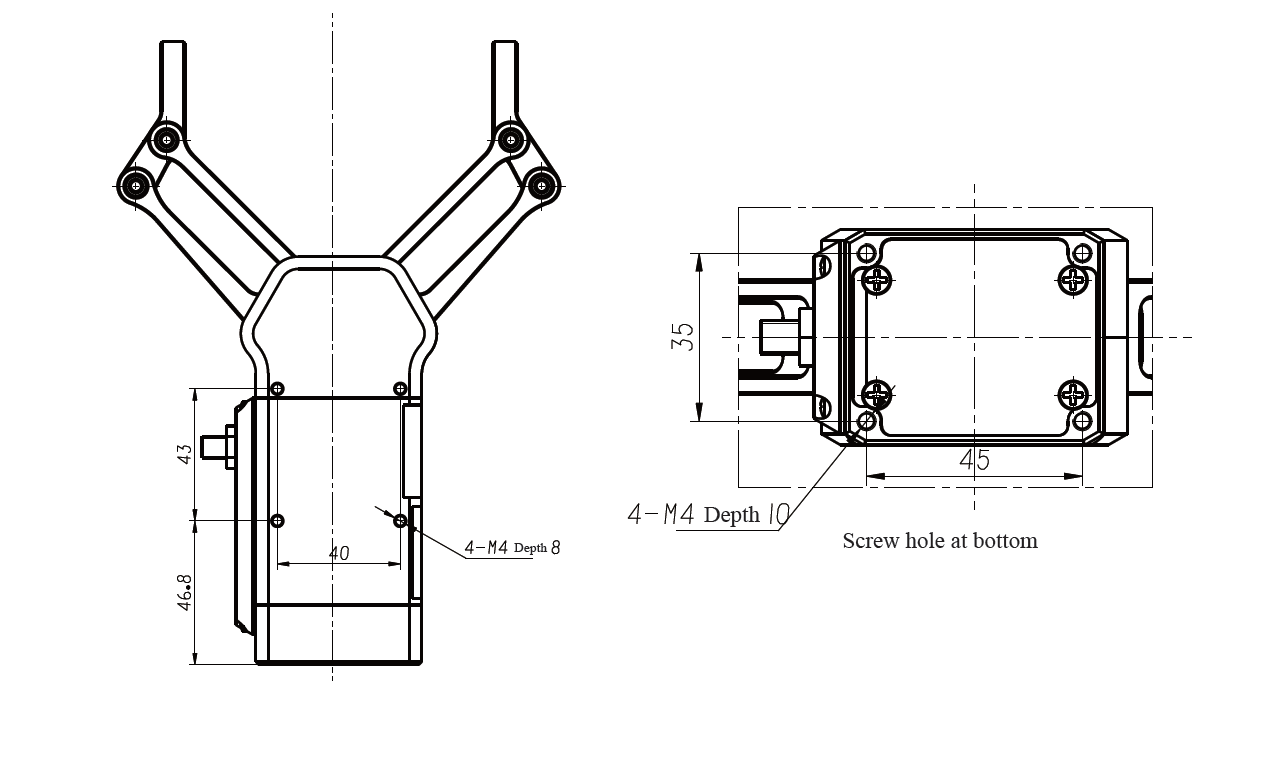
แผนภาพการติดตั้งมิติ
ธุรกิจของเรา


หมวดหมู่สินค้า
-

HITBOT มือจับไฟฟ้า SERIES – Z-EFG-12 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...
-
-300x255-300x300.png)
DH ROBOTICS SERVO ELECTRIC GRIPPER PGHL SERIES ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGD SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...