ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-20 ตัวจับยึดไฟฟ้าแบบขนาน


หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

• ตัวควบคุมในตัว
• สามารถปรับระยะการเคลื่อนที่และแรงจับยึดได้
• สามารถเปลี่ยนส่วนปลายเพื่อปรับให้เข้ากับความต้องการต่างๆ ได้
• หยิบจับสิ่งของที่แตกหักง่ายและเสียรูปทรงได้ง่าย เช่น ไข่หลอดทดลอง วงแหวน ฯลฯ
• เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการ โรงพยาบาล)
ควบคุมได้อย่างแม่นยำ ยึดจับได้ในพื้นที่แคบ รวดเร็วและมั่นคงในการยึดจับ
แรงยึดสูง
ระยะการเคลื่อนที่ทั้งหมดคือ 20 มม. แรงยึดคือ 80 นิวตัน
ความแม่นยำในการควบคุม
ความแม่นยำในการวัดซ้ำ: ±0.02 มม.
อายุการใช้งานยาวนาน
หลายสิบล้านรอบการทำงาน เกินกว่าขีดจำกัดของระบบจับยึดด้วยลม
ตัวควบคุมถูกติดตั้งมาในตัว
ใช้พื้นที่น้อย สะดวกในการติดตั้ง
โหมดควบคุม
ตัวควบคุมพัลส์และอินพุต/เอาต์พุต (เป็นตัวเลือก)
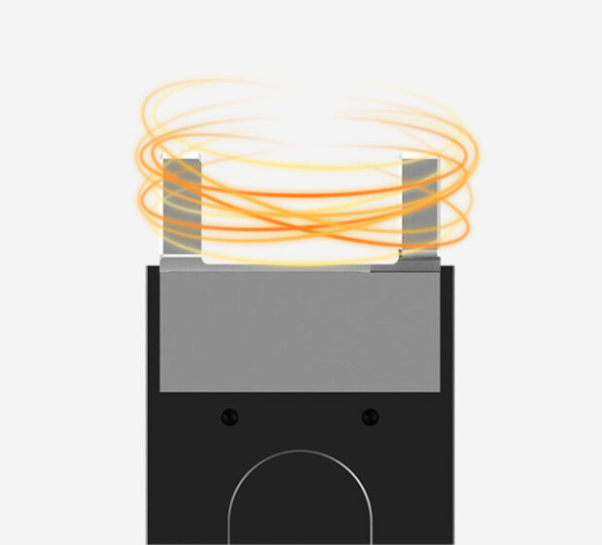
การหนีบแบบอ่อน
มันสามารถหนีบวัตถุที่เปราะบางได้

ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| รุ่นหมายเลข Z-EFG-20 | พารามิเตอร์ |
| ทั้งหมด จังหวะ | 20 มม. |
| แรงยึดจับ | 30~80N |
| ความสามารถในการทำซ้ำ | ±0.02 มม. |
| น้ำหนักการจับที่แนะนำ | 0.8 กก. |
| การแพร่เชื้อ โหมด | เฟืองแร็ค + ตัวนำลูกกลิ้งขวาง |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.45 วินาที |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80(ไม่มีน้ำค้างแข็ง) |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| การควบคุมจังหวะ | ปรับได้ |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 0.458 กก. |
| มิติ(ล*ว*ฮ) | 44*30*124.7 มม. |
| การวางตำแหน่งตัวควบคุม | ในตัว |
| พลัง | 5W |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| กระแสสูงสุด | 1A |
| แรงดันไฟฟ้าที่กำหนด | 24 โวลต์ |
| กระแสไฟสแตนด์บาย | 0.2เอ |
| ทนต่อแรงกระแทก / ทนต่อแรงสั่นสะเทือน | 98 เมตร/วินาที |
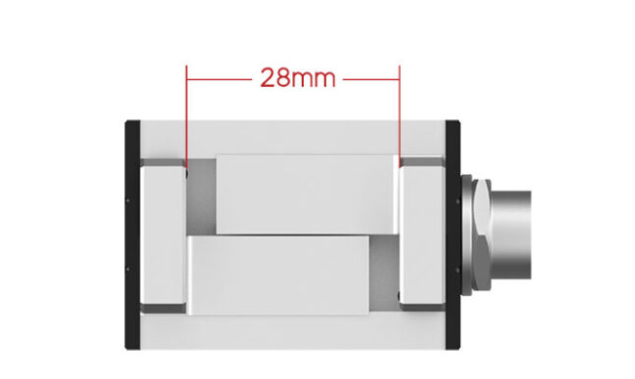
| เส้นผ่านศูนย์กลางมอเตอร์ | 28 มม. |
* แรงยึดจับของ Z-EFG-20: สามารถปรับแรงยึดจับได้โดยการเพิ่มวัสดุที่สามารถเปลี่ยนรูปได้ตามต้องการเข้าไปที่ด้านหน้าของอุปกรณ์จับยึด ซึ่งจะได้มาจากการปรับตามเส้นโค้งของการเปลี่ยนรูปและแรงที่เหมาะสม
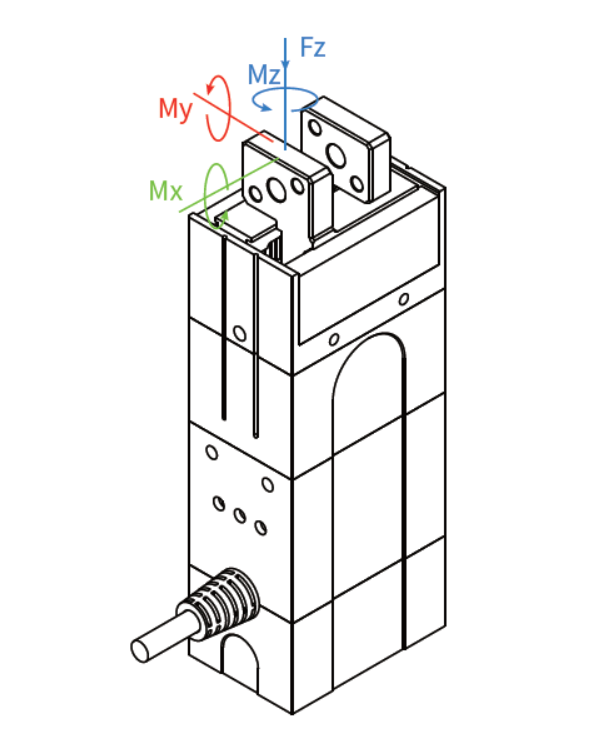
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 150N |
| แรงบิดที่อนุญาต | |
| มx: | 2.1 นิวตันเมตร |
| ของฉัน: | 2.34 นิวตันเมตร |
| มz: | 2 นิวตันเมตร |
แรงหนีบสูง ควบคุมแรงได้อย่างแม่นยำ

ตัวจับยึดไฟฟ้าใช้การออกแบบระบบส่งกำลังและการชดเชยการคำนวณการขับเคลื่อนแบบพิเศษ แรงจับยึดสามารถปรับได้อย่างต่อเนื่องที่ 80N ระยะการเคลื่อนที่ทั้งหมด 20 มม. และความแม่นยำในการทำซ้ำอยู่ที่ ±0.02 มม.
โหมดการเคลื่อนไหวและจังหวะการตีสามารถปรับได้
การเคลื่อนที่ของตัวจับยึดไฟฟ้าเป็นแบบการเคลื่อนที่ขนานสองนิ้ว โดยมีเวลาในการเคลื่อนที่ต่อจังหวะสั้นที่สุดเพียง 0.45 วินาที และสามารถรับน้ำหนักได้ ≤0.8 กิโลกรัม ซึ่งสามารถตอบสนองความต้องการในการจับยึดที่มั่นคงสำหรับสายการผลิตได้
โครงสร้างกะทัดรัด ติดตั้งได้ยืดหยุ่น

Z-EFG-20 มีขนาด L40*W30*H124.7 มม. โครงสร้างกะทัดรัด รองรับโหมดการติดตั้งมากกว่าห้าแบบ มีตัวควบคุมในตัว ใช้พื้นที่น้อย ทำให้สามารถใช้งานจับยึดชิ้นงานได้หลากหลายอย่างสะดวก


ระบบขับเคลื่อนและควบคุมแบบรวมในตัว พร้อมระบบจับยึดแบบนุ่มนวล

ส่วนท้ายของ Z-EFG-20 สามารถเปลี่ยนได้ง่าย ลูกค้าสามารถหนีบวัตถุที่ต้องการได้ เพื่อออกแบบส่วนท้ายและรักษาประสิทธิภาพการทำงานของตัวจับยึดไฟฟ้าให้สูงสุด
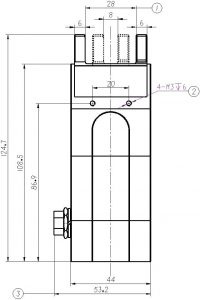
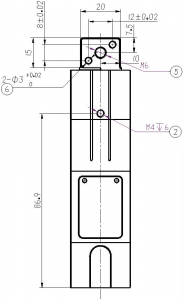
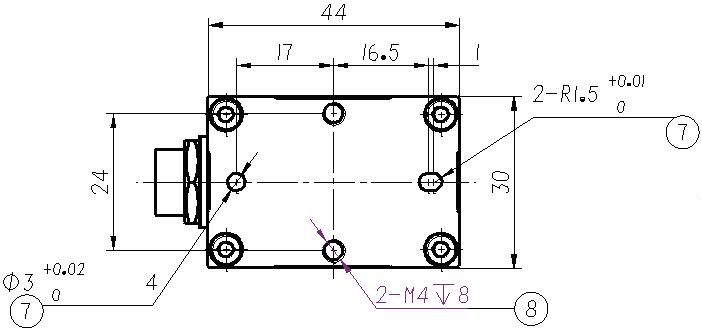
แผนภาพการติดตั้งมิติ
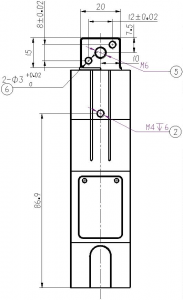
① จังหวะการเคลื่อนที่ของนิ้วจับยึด
② ตำแหน่งติดตั้งด้านข้าง (รูเกลียว)
③ ตำแหน่งการเดินสายไฟของปลั๊กไฟสำหรับงานการบิน
④ ตำแหน่งการปรับแรงจับยึด (ซ้าย) และไฟแสดงสถานะ (ขวา)
⑤ ตำแหน่งติดตั้งตัวจับยึด (รูเกลียว)
⑥ ตำแหน่งการติดตั้งตัวจับยึด (รูสำหรับเสียบหมุด)
⑦ ตำแหน่งการติดตั้งด้านล่าง (รูสำหรับเสียบหมุด)
⑧ ตำแหน่งติดตั้งด้านล่าง (รูเกลียว)
ธุรกิจของเรา


หมวดหมู่สินค้า
-

ชุดเครื่องจับชิ้นงานไฟฟ้า HITBOT – รุ่น Z-EFG-C5...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...