ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-FS อุปกรณ์จับยึดไฟฟ้าแบบทำงานร่วมกัน




หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

·อุปกรณ์จับยึดไฟฟ้าแบบเซอร์โวมอเตอร์ขนาดเล็กแต่ทรงพลัง
·สามารถเปลี่ยนเทอร์มินัลได้เพื่อให้ตรงกับข้อกำหนดของโครงการต่างๆ
·สามารถหยิบจับวัตถุที่แตกหักง่ายและเสียรูปทรงได้ เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
·เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการและโรงพยาบาล)
ออกแบบพิเศษสำหรับแขนหุ่นยนต์หกแกน พร้อมตัวจับยึดไฟฟ้าแบบช่วงชัก 8 มม.
ความถี่สูง
เวลาที่สั้นที่สุดสำหรับการเคลื่อนที่แบบจังหวะเดียวคือ 0.1 วินาที
อายุการใช้งานยาวนาน
รอบการทำงานหลายสิบล้านรอบ เกินกว่านั้นของเครื่องจับยึดอากาศ
เสียบปลั๊กแล้วใช้งานได้เลย
ออกแบบมาเป็นพิเศษสำหรับตัวจับยึดไฟฟ้าหกแกน
รูปเล็ก
ขนาดเล็ก จึงสามารถใช้หนีบในพื้นที่จำกัดได้
สามารถเปลี่ยนหางได้
ส่วนหางสามารถปรับเปลี่ยนได้เพื่อให้ตรงตามความต้องการต่างๆ
การหนีบแบบอ่อน
มันสามารถหนีบวัตถุที่เปราะบางได้

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม

ผลิตภัณฑ์ที่เกี่ยวข้อง


พารามิเตอร์ข้อมูลจำเพาะ
ตัวจับยึดไฟฟ้าแบบ 2 นิ้วขนาน รองรับการจับยึดแบบนุ่มนวล และสามารถจับไข่ หลอด และวัตถุที่แตกหักง่ายอื่นๆ ได้ ตัวจับยึด Z-EFG-FS สามารถประกอบเข้ากับแขนหุ่นยนต์ได้อย่างง่ายดาย เพื่อสร้างสายการผลิตอัตโนมัติอย่างสมบูรณ์
- อุปกรณ์จับยึดไฟฟ้าแบบเซอร์โวมอเตอร์ขนาดเล็กแต่ทรงพลัง
- สามารถเปลี่ยนเทอร์มินัลได้เพื่อให้ตรงกับข้อกำหนดของโครงการต่างๆ
- สามารถหยิบจับวัตถุที่แตกหักง่ายและเสียรูปทรงได้ เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
- เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการและโรงพยาบาล)
| หมายเลขรุ่น Z-EFG-FS | พารามิเตอร์ |
| ระยะชักทั้งหมด | 8 มม. |
| แรงยึดจับ | 8~20N (ปรับได้) |
| ความสามารถในการทำซ้ำ | ±0.02 มม. |
| น้ำหนักการจับที่แนะนำ | ≤ 0.3 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + ตัวนำลูกกลิ้งขวาง |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.1 วินาที |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| การควบคุมจังหวะ | No |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 0.3 กก. |
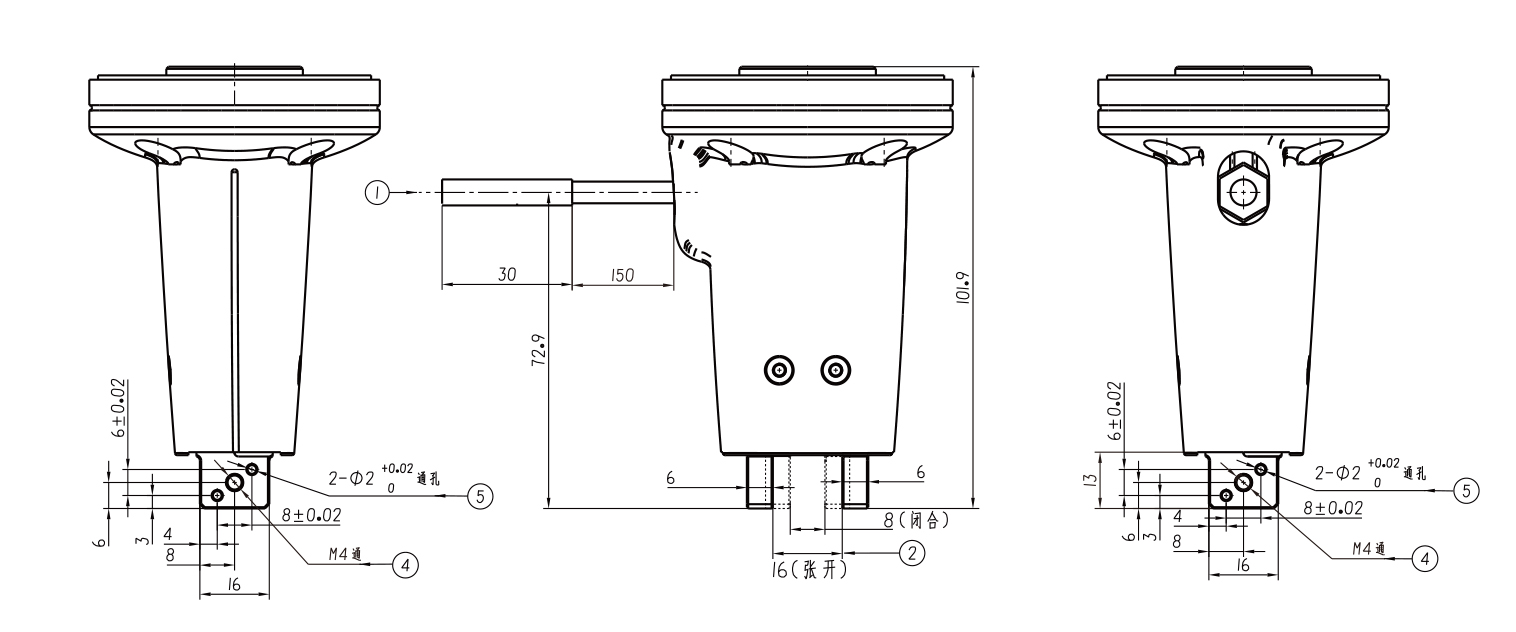
| ขนาด (ยาว*กว้าง*สูง) | 67*67*101.9 มม. |
| การวางตำแหน่งตัวควบคุม | ในตัว |
| พลัง | 5W |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| แรงดันไฟฟ้าที่กำหนด | 24V±10% |
| กระแสสูงสุด | 0.6เอ |
| แขนหุ่นยนต์หกแกนที่ปรับเปลี่ยนได้ | UR, Aubo |
ระบบขับเคลื่อนและควบคุมแบบบูรณาการ
Z-EFG-FS เป็นอุปกรณ์จับยึดไฟฟ้าขนาดเล็กที่มีระบบเซอร์โวในตัว โดยใช้เพียงอุปกรณ์จับยึดไฟฟ้าตัวเดียวก็สามารถทดแทนคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วแม่เหล็กไฟฟ้า + วาล์วควบคุมการไหล + อุปกรณ์จับยึดลมได้


ใช้งานร่วมกับแขนหุ่นยนต์หกแกนได้

ตัวจับยึดไฟฟ้า Z-EFG-FS สามารถใช้งานร่วมกับแขนหุ่นยนต์หกแกนทั่วไปได้ ทำให้ใช้งานได้ทันที มีระยะการเคลื่อนที่ 8 มม. แรงจับยึด 8-20 นิวตัน และสามารถปรับระยะการเคลื่อนที่และแรงจับยึดได้อย่างต่อเนื่อง
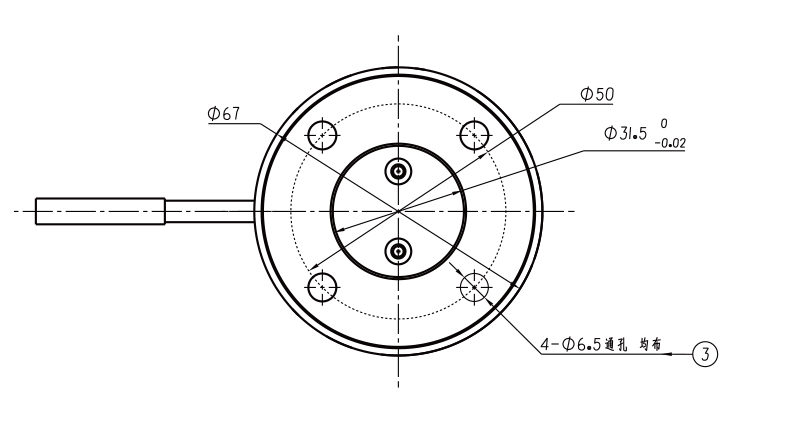
ขนาดเล็ก ติดตั้งง่าย

ขนาดของผลิตภัณฑ์ Z-EFG-FS คือ ยาว 67 * กว้าง 67 * สูง 101.9 มม. ขนาดเล็ก สามารถใช้งานได้อย่างยืดหยุ่นในพื้นที่จำกัดเพื่อใช้ในการหนีบ


ตอบสนองฉับไว แม่นยำ ควบคุมกำลังได้

เวลาในการเปิด/ปิดเพียง 0.1 วินาที ทำให้สามารถจัดการกับงานหนีบได้อย่างรวดเร็ว ส่วนท้ายสามารถเปลี่ยนได้ง่าย ลูกค้าสามารถปรับแต่งส่วนท้ายได้ตามความต้องการในการผลิตของตนเองได้อย่างยืดหยุ่น
แผนภาพการติดตั้งมิติ
พารามิเตอร์ทางไฟฟ้า
แรงดันไฟฟ้าที่กำหนด 24±2V
กระแสไฟฟ้า 0.4A

ธุรกิจของเรา


หมวดหมู่สินค้า
-

เครื่องมือจับยึดไฟฟ้า HITBOT ซีรีส์ Z-EFG-20S สำหรับพารา...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-R Collab...
-

เครื่องมือจับยึดไฟฟ้า HITBOT รุ่น Z-EFG-26P สำหรับใช้งานกับสัตว์...
-
-300x255-300x300.png)
DH ROBOTICS SERVO ELECTRIC GRIPPER PGHL SERIES ...
-

ชุดเครื่องจับชิ้นงานไฟฟ้า HITBOT – รุ่น Z-EFG-C3...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...