ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-ERG-20 ตัวจับยึดไฟฟ้าแบบหมุน




หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
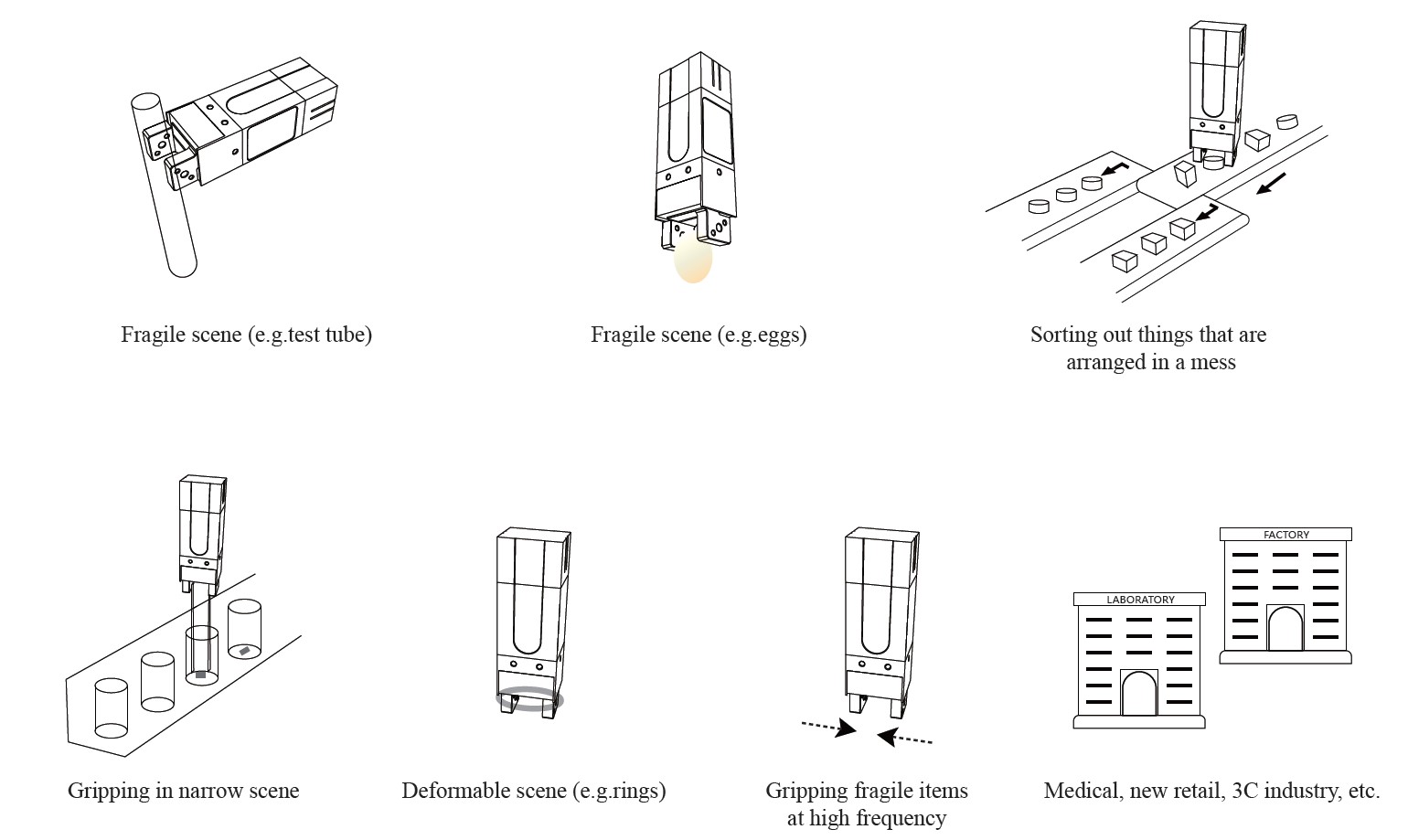
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z ซีรีส์มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน
คุณสมบัติ

• รองรับการหมุนแบบไม่จำกัดและการหมุนสัมพัทธ์ ไม่ต้องใช้แหวนสลิป ลดต้นทุนการบำรุงรักษา
• สามารถควบคุมการหมุน แรงยึด ตำแหน่ง และความเร็วได้อย่างแม่นยำ
• อายุการใช้งานยาวนาน ใช้งานได้หลายรอบ ประสิทธิภาพดีกว่าตัวจับยึดแบบนิวแมติก
• ตัวควบคุมในตัว: ใช้พื้นที่น้อยและติดตั้งง่าย
• โหมดควบคุม: รองรับการควบคุมและการรับส่งข้อมูลผ่านบัส Modbus
ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
แขนกล Z-ERG-20 ใช้งานง่ายกับผู้คนและรองรับการจับยึดแบบนุ่มนวล ตัวจับยึดไฟฟ้ามีการบูรณาการสูงและมีข้อดีหลายประการ:
●รองรับการหมุนแบบไม่จำกัดและการหมุนสัมพัทธ์ ไม่ต้องใช้แหวนสลิป ต้นทุนการบำรุงรักษาต่ำ
●สามารถควบคุมการหมุน แรงยึด การเจาะ และความเร็วได้อย่างแม่นยำ
●อายุการใช้งานยาวนาน: หมุนได้หลายสิบล้านรอบ ดีกว่าเครื่องอัดอากาศ
●มีตัวควบคุมในตัว ช่วยประหยัดพื้นที่ และง่ายต่อการติดตั้งใช้งาน
●โหมดควบคุม: รองรับการควบคุม Modbus และ I/O
| รุ่นหมายเลข Z-ERG-20 | พารามิเตอร์ |
| ระยะชักทั้งหมด | ปรับได้ 20 มม. |
| แรงยึดจับ | ปรับได้ 10-35N |
| ความสามารถในการทำซ้ำ | ±0.2 มม. |
| น้ำหนักการจับที่แนะนำ | ≤0.4 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + รางเลื่อนเชิงเส้น |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.20 วินาที |
| แรงบิดสูงสุดในการหมุน | 0.3 นิวตันเมตร |
| ความเร็วในการหมุนสูงสุด | 240 รอบต่อนาที |
| ช่วงการหมุน | การหมุนไม่สิ้นสุด |
| การหมุนย้อนกลับ | ±1° |
| น้ำหนัก | 1.0 กก. |
| มิติ | 54*54*141 มม. |
| แรงดันไฟฟ้าใช้งาน | 24V±10% |
| กระแสไฟฟ้าที่กำหนด | 1.5A |
| กระแสสูงสุด | 3A |
| พลัง | 50 วัตต์ |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | มอเตอร์เซอร์โว |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |
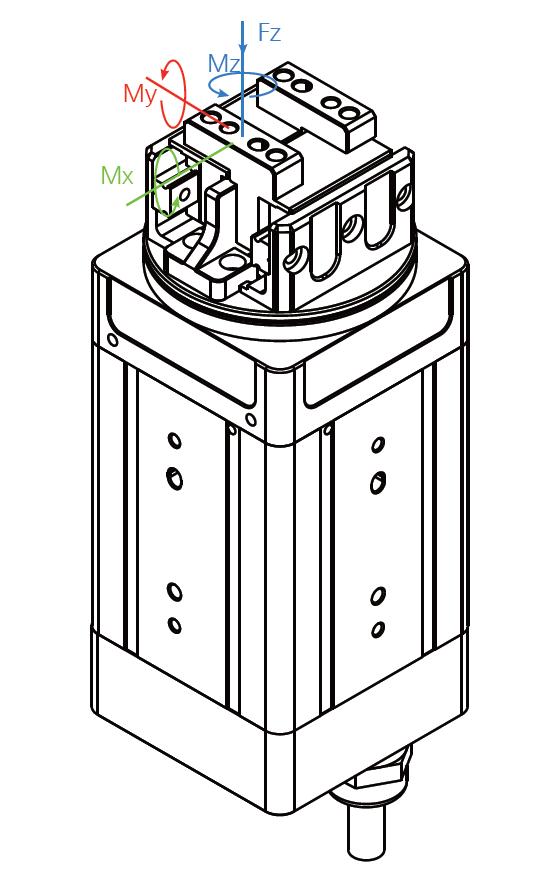
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 100N |
| แรงบิดที่อนุญาต | |
| มx: | 1.35 นิวตันเมตร |
| ของฉัน: | 0.8 นิวตันเมตร |
| มz: | 0.8 นิวตันเมตร |
การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
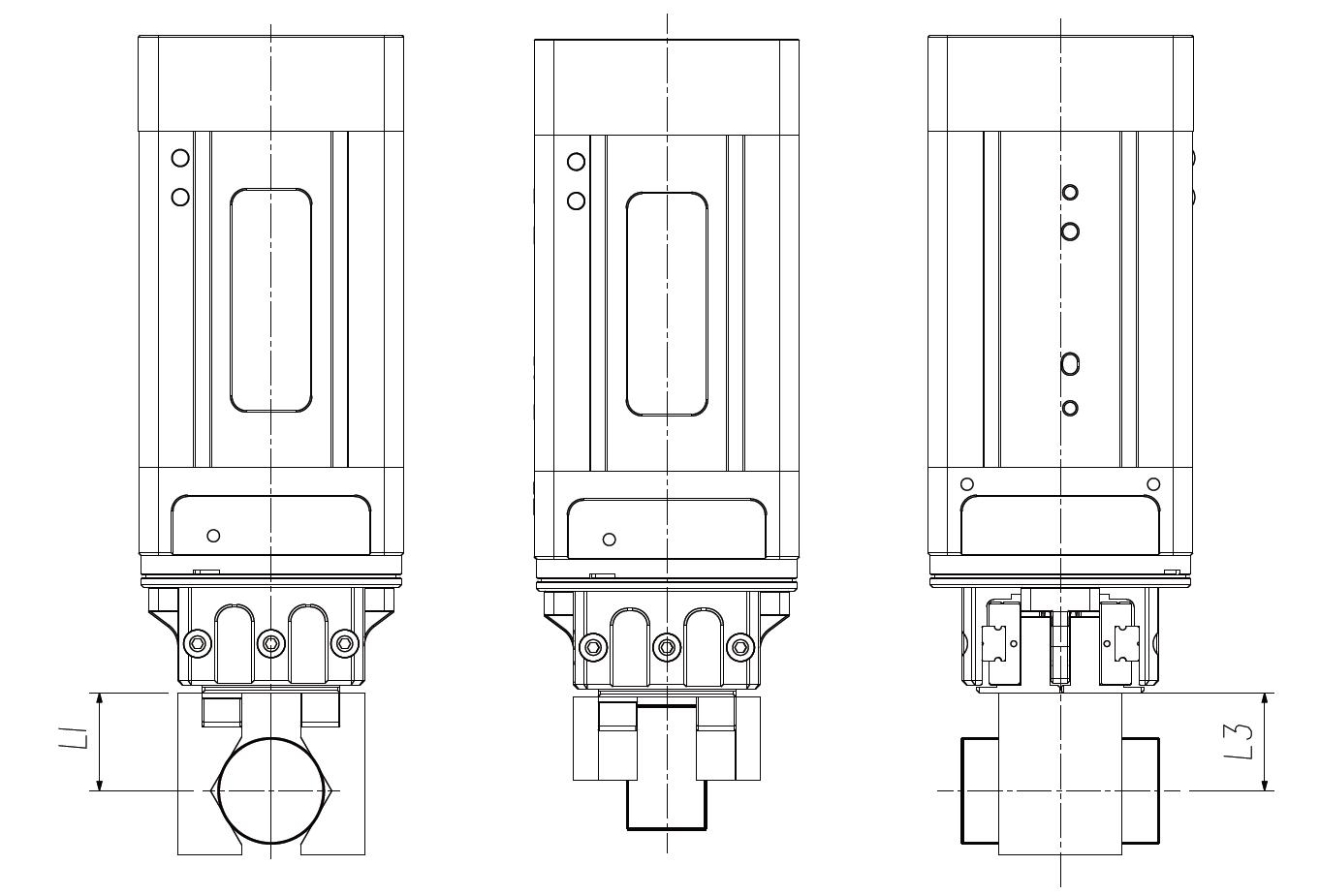
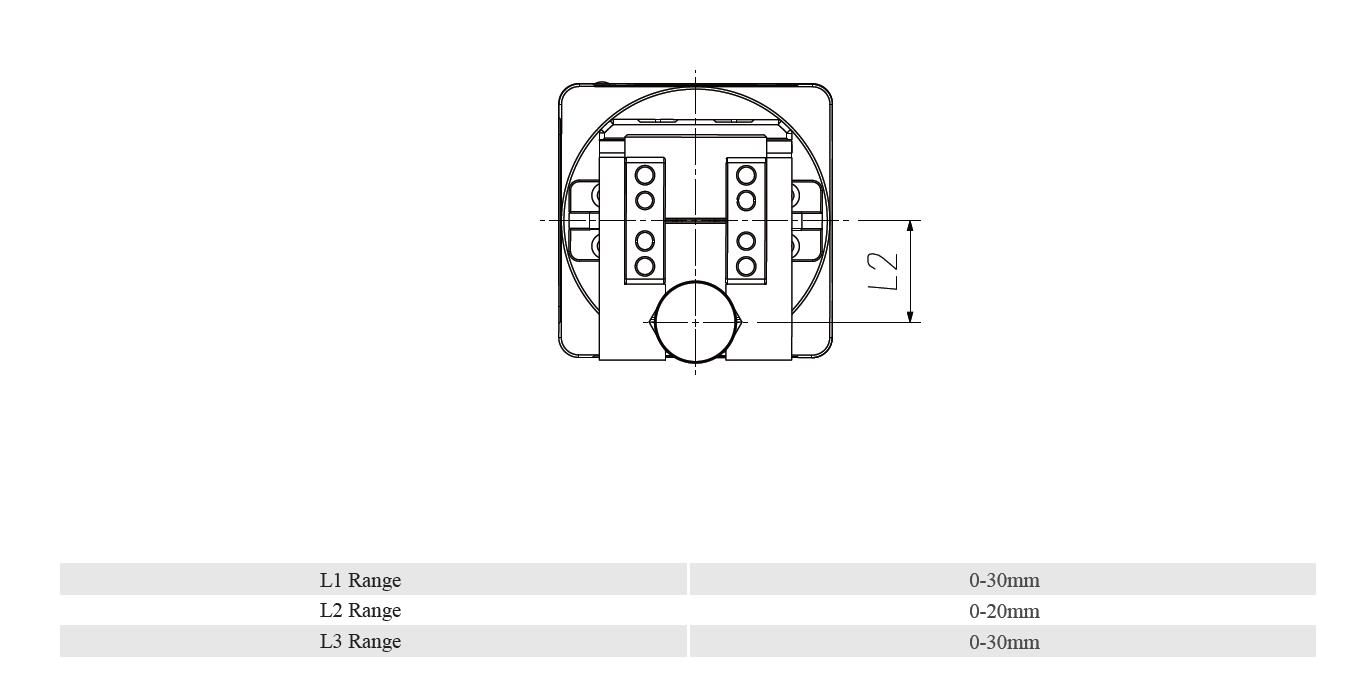
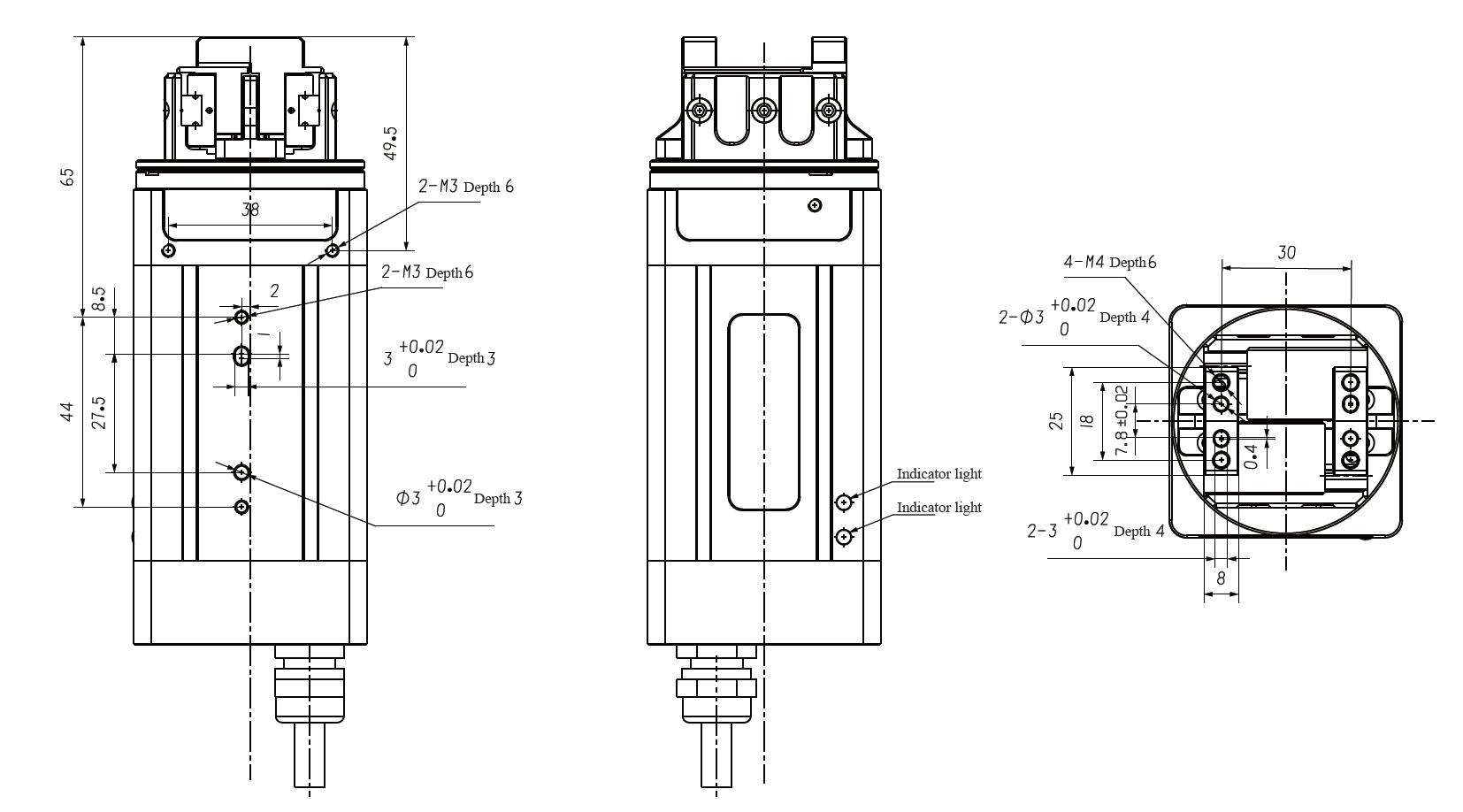
แผนภาพการติดตั้งมิติ
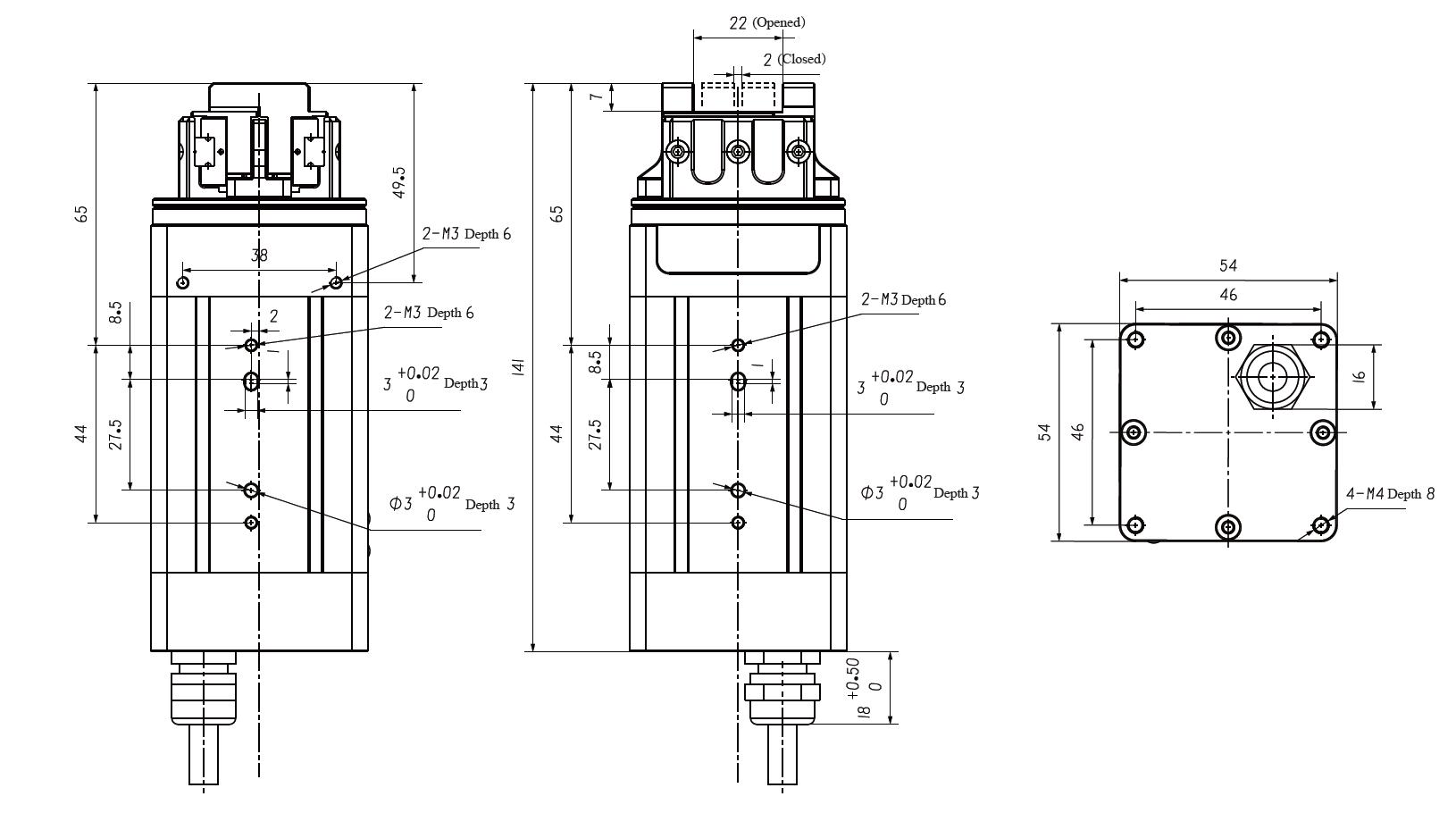
① ปลั๊กการบินห้าแกน RKMV8-354 ถึง RKMV8-354
② ระยะการเคลื่อนที่ของตัวจับยึดไฟฟ้าคือ 20 มม.
③ ตำแหน่งการติดตั้ง ให้ใช้สกรู M6 สองตัวยึดเข้ากับหน้าแปลนที่ปลายแขนหุ่นยนต์ UR
④ ตำแหน่งการติดตั้ง ตำแหน่งการติดตั้งอุปกรณ์ (สกรู M6)
⑤ ตำแหน่งการติดตั้ง ตำแหน่งการติดตั้งอุปกรณ์ยึด (รูหมุดทรงกระบอก 3 รู)
ธุรกิจของเรา







