ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-EFG-30 ตัวจับยึดไฟฟ้าแบบขนาน



หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน
ชุดจับยึดหุ่นยนต์ SCIC Z-EFG มีขนาดเล็ก พร้อมระบบเซอร์โวในตัว ทำให้สามารถควบคุมความเร็ว ตำแหน่ง และแรงจับยึดได้อย่างแม่นยำ ระบบจับยึดล้ำสมัยของ SCIC สำหรับโซลูชันระบบอัตโนมัติ จะช่วยเปิดโอกาสใหม่ๆ ในการทำงานอัตโนมัติที่คุณไม่เคยคิดมาก่อน

คุณสมบัติ

• ตัวควบคุมในตัว
• สามารถปรับระยะการเคลื่อนที่และแรงจับยึดได้
• ใช้มอเตอร์เซอร์โว
• สามารถเปลี่ยนส่วนปลายเพื่อปรับให้เข้ากับความต้องการต่างๆ ได้
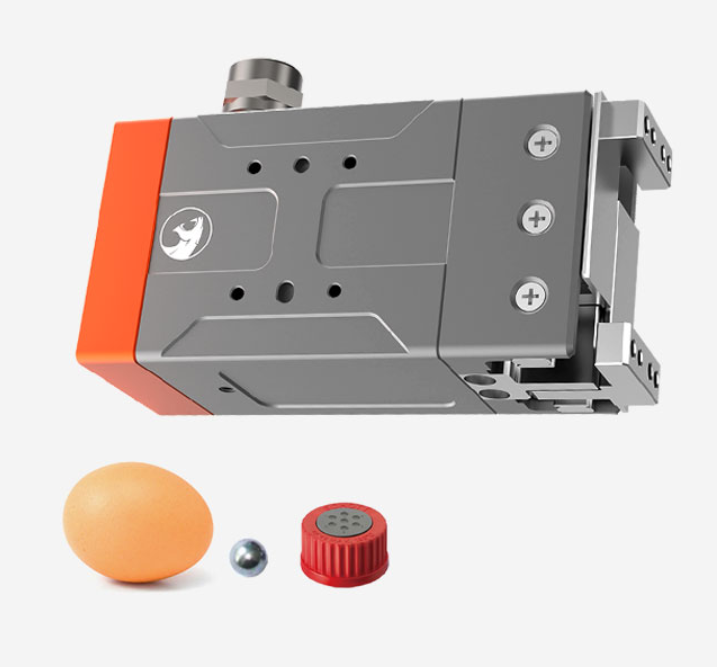
• หยิบจับสิ่งของที่แตกหักง่ายและเสียรูปทรงได้ง่าย เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
• เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการ โรงพยาบาล)
แรง, บิต และความเร็ว สามารถควบคุมได้ด้วยระบบ Modbus
การใช้งานหลายรายการ
การทดสอบการตกกระแทกและผลผลิตระดับเขต
ความแม่นยำในการควบคุม
แรง, ขนาดหัวเจาะ และความเร็ว สามารถควบคุมได้ด้วยระบบ Modbus
อายุการใช้งานยาวนาน
วงกลมหลายสิบล้านวงตัวจับลมเหนือสะพานลอย
ตัวควบคุมถูกติดตั้งมาในตัว
ผ้าคลุมห้องขนาดเล็ก ติดตั้งง่ายและสะดวก
โหมดควบคุม
485 (Modbus RTU), พัลส์, อินพุต/เอาต์พุต
การหนีบแบบอ่อน
มันสามารถหนีบวัตถุที่เปราะบางได้

● ส่งเสริมการปฏิวัติการเปลี่ยนผ่านจากตัวจับยึดแบบใช้ลมไปสู่ตัวจับยึดแบบใช้ไฟฟ้า ซึ่งเป็นตัวจับยึดไฟฟ้าตัวแรกในประเทศจีนที่มีระบบเซอร์โวในตัว
● ชุดอะไหล่ทดแทนที่สมบูรณ์แบบสำหรับคอมเพรสเซอร์ลม + ตัวกรอง + วาล์วโซลินอยด์ + วาล์วควบคุมการไหล + ตัวจับยึดแบบนิวแมติก
● อายุการใช้งานที่ยาวนานหลายรอบ สอดคล้องกับกระบอกสูบแบบญี่ปุ่นดั้งเดิม

ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
Z-EFG-30 เป็นอุปกรณ์จับยึดไฟฟ้าที่มีมอเตอร์เซอร์โว Z-EFG-30 มีมอเตอร์และตัวควบคุมในตัว ขนาดเล็กแต่ทรงพลัง สามารถใช้แทนอุปกรณ์จับยึดแบบใช้ลมแบบดั้งเดิมและประหยัดพื้นที่ทำงานได้มาก
● อุปกรณ์จับยึดไฟฟ้าแบบเซอร์โวมอเตอร์ขนาดเล็กแต่ทรงพลัง
● สามารถเปลี่ยนเทอร์มินัลได้เพื่อให้ตรงกับความต้องการของโครงการต่างๆ
● สามารถหยิบจับวัตถุที่แตกหักง่ายและเสียรูปทรงได้ เช่น ไข่ หลอดทดลอง แหวน เป็นต้น
● เหมาะสำหรับสถานที่ที่ไม่มีแหล่งจ่ายอากาศ (เช่น ห้องปฏิบัติการและโรงพยาบาล)
ตัวจับยึดไฟฟ้าใช้การออกแบบระบบส่งกำลังและการชดเชยการคำนวณการขับเคลื่อนแบบพิเศษ แรงจับยึดสามารถปรับได้อย่างต่อเนื่องตั้งแต่ 10N-40N และมีความแม่นยำในการทำซ้ำ ±0.02 มม. จังหวะการเคลื่อนที่ต่อครั้งที่สั้นที่สุดเพียง 0.2 วินาที สามารถตอบสนองความต้องการการจับยึดที่รวดเร็วและเสถียรของสายการผลิตได้ ส่วนท้ายของ Z-EFG-30 สามารถเปลี่ยนได้ง่าย ลูกค้าสามารถจับยึดวัตถุตามความต้องการของตนเอง ออกแบบส่วนท้ายเองได้ และยังคงรักษาความสามารถในการจับยึดของตัวจับยึดไฟฟ้าให้มีประสิทธิภาพสูงสุด
| รุ่นหมายเลข Z-EFG-30 | พารามิเตอร์ |
| ระยะชักทั้งหมด | ปรับได้ 30 มม. |
| แรงยึดจับ | ปรับได้ 10-40N |
| ความสามารถในการทำซ้ำ | ±0.2 มม. |
| น้ำหนักการจับที่แนะนำ | ≤0.4 กก. |
| โหมดการส่งสัญญาณ | เฟืองแร็ค + รางเลื่อนเชิงเส้น |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.20 วินาที |
| โหมดการเคลื่อนไหว | นิ้วสองนิ้วขยับในแนวนอน |
| น้ำหนัก | 0.55 กก. |
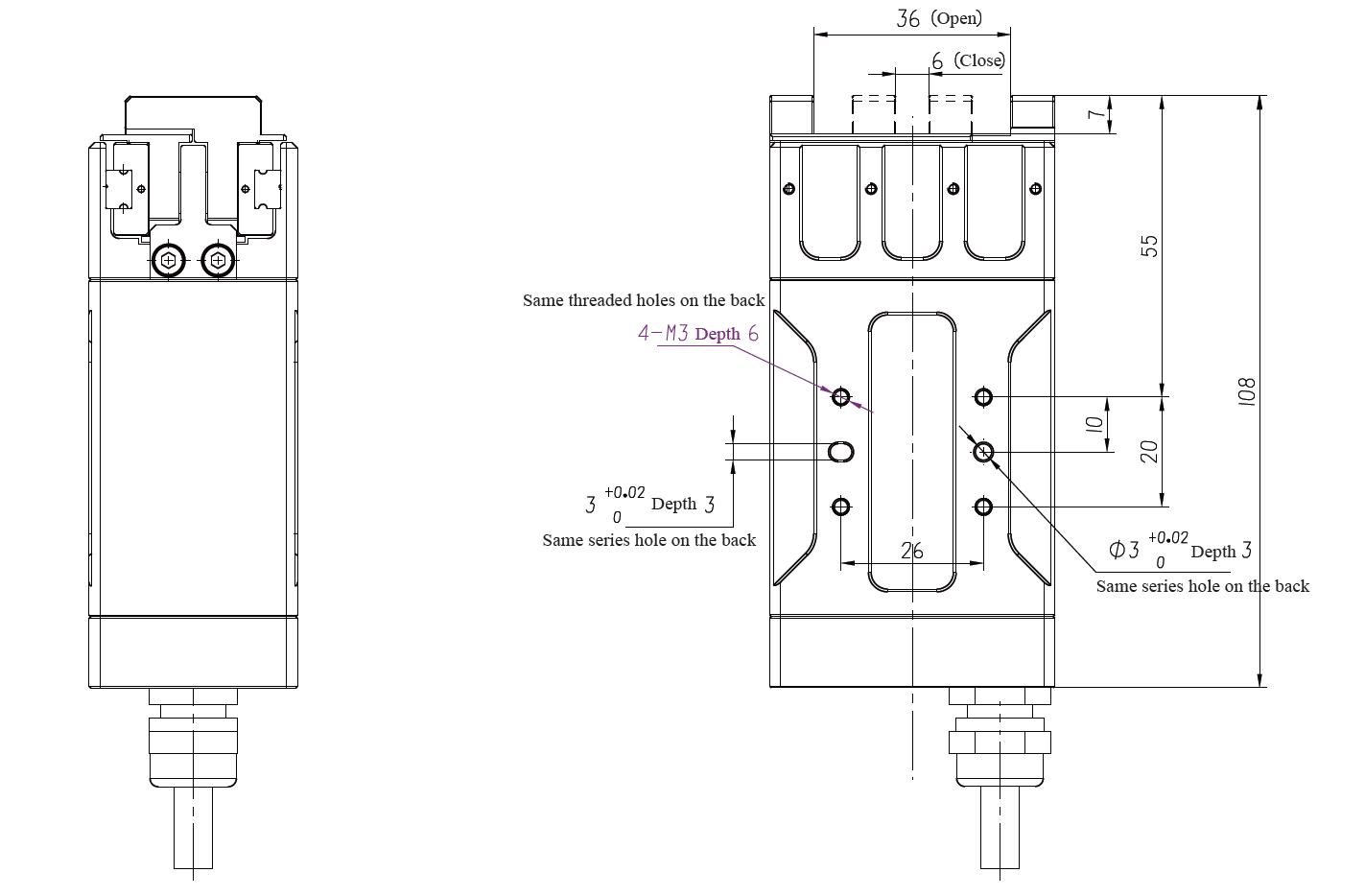
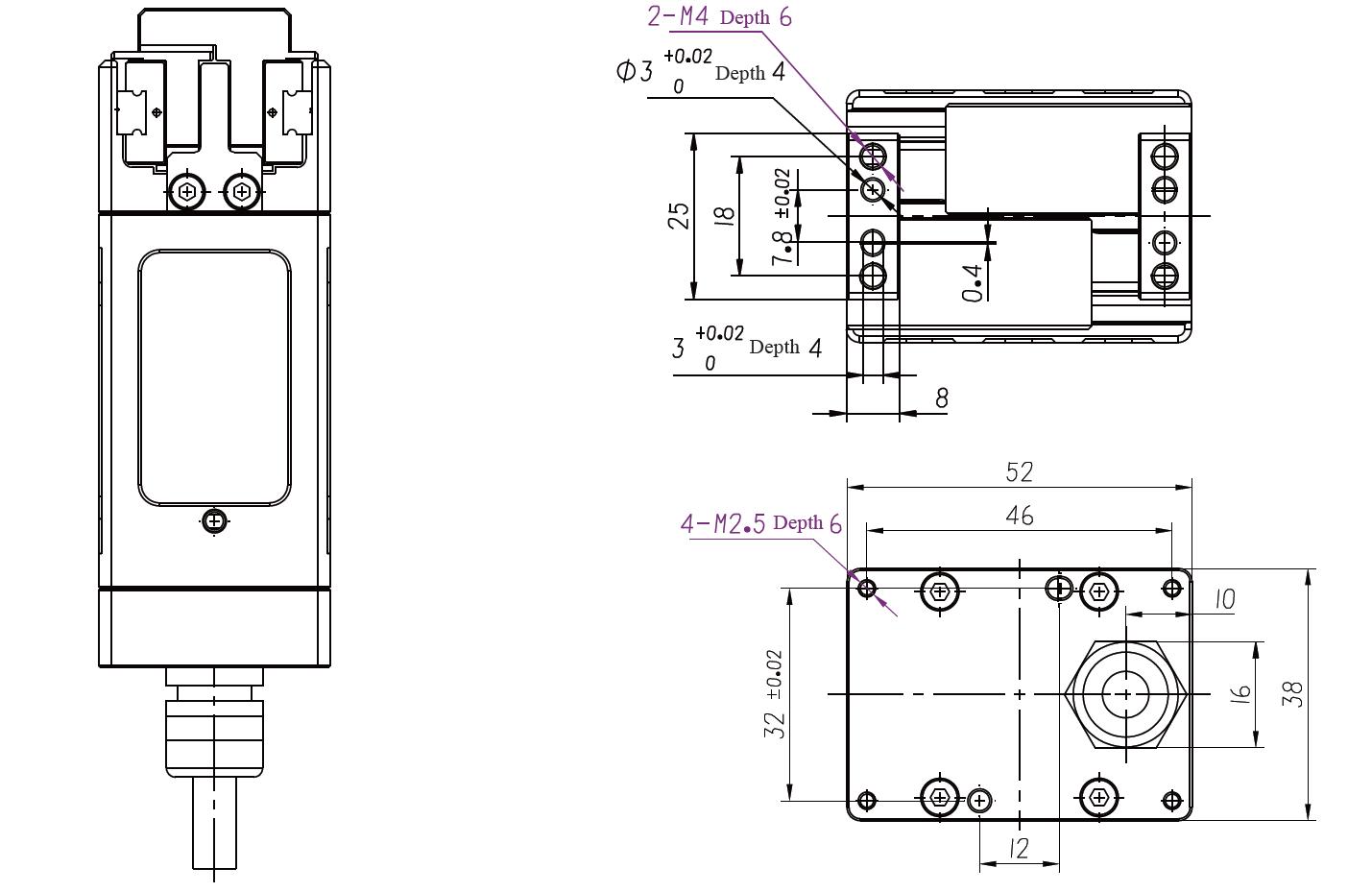
| ขนาด (ยาว*กว้าง*สูง) | 52*38*108 มม. |
| แรงดันไฟฟ้าใช้งาน | 24V±10% |
| กระแสไฟฟ้าที่กำหนด | 0.5A |
| กระแสสูงสุด | 1A |
| พลัง | 12 วัตต์ |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | กระแสตรงไร้แปรงถ่าน |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80 (ไม่มีน้ำค้างแข็ง) |
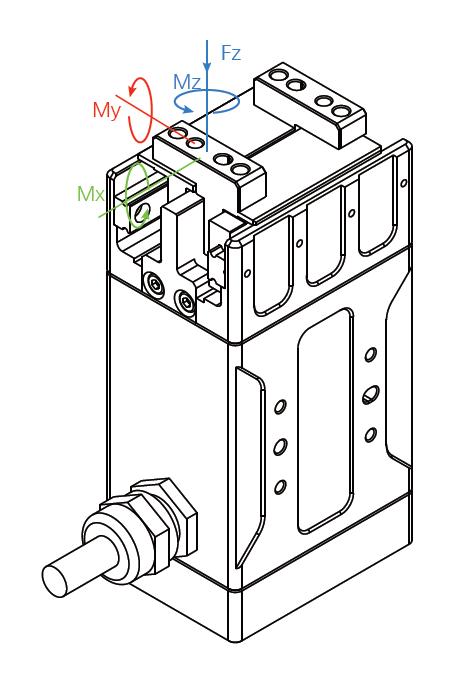
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 200N |
| แรงบิดที่อนุญาต | |
| มx: | 1.6 นิวตันเมตร |
| ของฉัน: | 1.2 นิวตันเมตร |
| มz: | 1.2 นิวตันเมตร |
การควบคุมแรงที่แม่นยำสูง

ตัวจับยึดไฟฟ้าใช้การออกแบบระบบส่งกำลังและการชดเชยการคำนวณการขับเคลื่อนแบบพิเศษ แรงจับยึดสามารถปรับได้อย่างต่อเนื่องตั้งแต่ 10N ถึง 4N และความแม่นยำในการทำซ้ำอยู่ที่ ±0.02 มม.
ตอบสนองรวดเร็วและมีเสถียรภาพ
จังหวะการตีครั้งเดียวที่สั้นที่สุดใช้เวลาเพียง 0.2 วินาที ซึ่งสามารถตอบสนองความต้องการได้ความต้องการความเร็วสูงและการจับยึดที่เสถียรของสายการผลิต
ขนาดเล็ก พกพาสะดวก
Z-EFG-30 มีขนาด L52*W38*H108 มม. โครงสร้างกะทัดรัด รองรับการติดตั้งได้มากกว่าห้าแบบ ตัวควบคุมอยู่ภายในตัว ใช้พื้นที่น้อย ตอบสนองความต้องการงานจับยึดที่หลากหลายได้อย่างง่ายดาย

ระบบขับเคลื่อนและควบคุมแบบบูรณาการ, ระบบจับยึดแบบนุ่มนวล
ส่วนท้ายของ Z-EFG-30 สามารถเปลี่ยนได้ง่าย ลูกค้าสามารถหนีบวัตถุได้ตามความต้องการของตนเอง ออกแบบส่วนท้ายได้เอง และยังคงรักษาประสิทธิภาพการหนีบของตัวจับยึดไฟฟ้าให้สูงสุดได้
การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
คำถามที่พบบ่อย
1. มีข้อกำหนดเรื่องความสมมาตรของการหมุน ดังนั้นเมื่อด้านทั้งสองของตัวจับยึดอยู่ใกล้กัน มันจะหยุดที่ตำแหน่งตรงกลางทุกครั้งใช่หรือไม่
คำตอบ: ใช่ มีข้อผิดพลาดด้านความสมมาตรน้อยกว่า 0.1 มม. และความสามารถในการทำซ้ำอยู่ที่ ±0.02 มม.
2. ตัวจับยึดมีส่วนที่ใช้ยึดชิ้นงานรวมอยู่ด้วยหรือไม่?
คำตอบ: ไม่ ผู้ใช้ต้องออกแบบชิ้นส่วนยึดจับเองตามชิ้นงานที่ต้องการยึดจับจริง นอกจากนี้ Hitbot ยังมีไลบรารีชิ้นส่วนยึดจับให้เลือกใช้ โปรดติดต่อเจ้าหน้าที่ของเราเพื่อขอรายละเอียดเพิ่มเติม
3. ตัวควบคุมไดรฟ์อยู่ที่ไหน และฉันต้องจ่ายเงินเพิ่มสำหรับมันหรือไม่?
คำตอบ: มันเป็นส่วนหนึ่งของตัวเครื่องอยู่แล้ว ไม่มีค่าใช้จ่ายเพิ่มเติม ราคาของตัวจับยึดได้รวมค่าตัวควบคุมไว้แล้ว
4. สามารถขยับนิ้วเพียงนิ้วเดียวได้หรือไม่?
คำตอบ: ไม่ค่ะ อุปกรณ์จับยึดที่เคลื่อนไหวได้ด้วยนิ้วเดียวอยู่ระหว่างการพัฒนา โปรดติดต่อเจ้าหน้าที่ของเราเพื่อขอรายละเอียดเพิ่มเติม
5. ความเร็วในการทำงานของ Z-EFG-30 คือเท่าไร?
คำตอบ: มอเตอร์ Z-EFG-30 ใช้เวลา 0.2 วินาทีสำหรับการเคลื่อนที่หนึ่งรอบเต็มทิศทาง และ 0.4 วินาทีสำหรับการเคลื่อนที่ไปกลับหนึ่งรอบ
ธุรกิจของเรา







