ชุดจับยึดไฟฟ้า HITBOT – รุ่น Z-ECG-10 จับยึดไฟฟ้าแบบสามนิ้ว




หมวดหมู่หลัก
แขนหุ่นยนต์อุตสาหกรรม / แขนหุ่นยนต์ร่วมปฏิบัติงาน / ตัวจับยึดไฟฟ้า / ตัวขับเคลื่อนอัจฉริยะ / โซลูชันระบบอัตโนมัติ
แอปพลิเคชัน

คุณสมบัติ

·การตรวจจับการตกของแคลมป์ ฟังก์ชันเอาต์พุตพื้นที่
·ควบคุมแรง ตำแหน่ง และความเร็วได้อย่างแม่นยำผ่าน Modbus
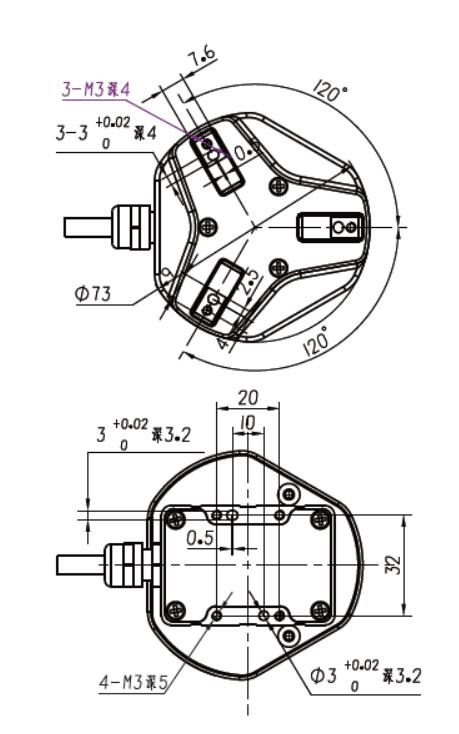
·ที่จับตรงกลางแบบสามนิ้ว
·ตัวควบคุมในตัว: ขนาดกะทัดรัด ผสานรวมได้ง่าย
·โหมดควบคุม: 485 (Modbus RTU), อินพุต/เอาต์พุต
เครื่องจับยึดไฟฟ้าแบบสามนิ้ว หนีบวัตถุทรงกระบอกได้ง่าย
ประสิทธิภาพสูง
แรงยึด: 3-10 นิวตัน
ความหนาแน่นพลังงานสูง
ความแม่นยำในการควบคุม
สามารถควบคุมได้ด้วยระบบ Modbus
การให้ข้อเสนอแนะอย่างชาญฉลาด
มีฟังก์ชันตรวจจับการตกกระแทกและเอาต์พุตระดับภูมิภาค
ตัวควบคุมในตัว
ขนาดกะทัดรัด ติดตั้งง่าย
โหมดควบคุมหลายแบบ
รองรับอินพุต/เอาต์พุต 485 (Modbus)
ที่จับสามนิ้ว
ตัวล็อคแบบสามนิ้ว เหมาะสำหรับใช้งานในหลากหลายโอกาส

ผลิตภัณฑ์ที่เกี่ยวข้อง



พารามิเตอร์ข้อมูลจำเพาะ
| รุ่นหมายเลข Z-ECG-10 | พารามิเตอร์ |
| ทั้งหมด จังหวะ | 10 มม. |
| แรงยึดจับ | 3-10N |
| ความสามารถในการทำซ้ำ | ±0.03 มม. |
| น้ำหนักการจับที่แนะนำ | น้ำหนักสูงสุด 0.2 กก. |
| การแพร่เชื้อ โหมด | เฟืองและรางนำลูกปืน + รางนำลูกปืน |
| การเติมจาระบีในชิ้นส่วนที่เคลื่อนไหว | ทุกๆ หกเดือน หรือ 1 ล้านการเคลื่อนไหว/เวลา |
| เวลาการเคลื่อนที่แบบจังหวะเดียว | 0.3 วินาที |
| ช่วงอุณหภูมิการทำงาน | 5-55℃ |
| ช่วงความชื้นใช้งาน | RH35-80(ไม่มีน้ำค้างแข็ง) |
| แบล็กแลช | ด้านเดียว: 0.2 มม. |
| การควบคุมจังหวะ | ปรับได้ |
| การปรับแรงหนีบ | ปรับได้ |
| น้ำหนัก | 0.5 กก. |
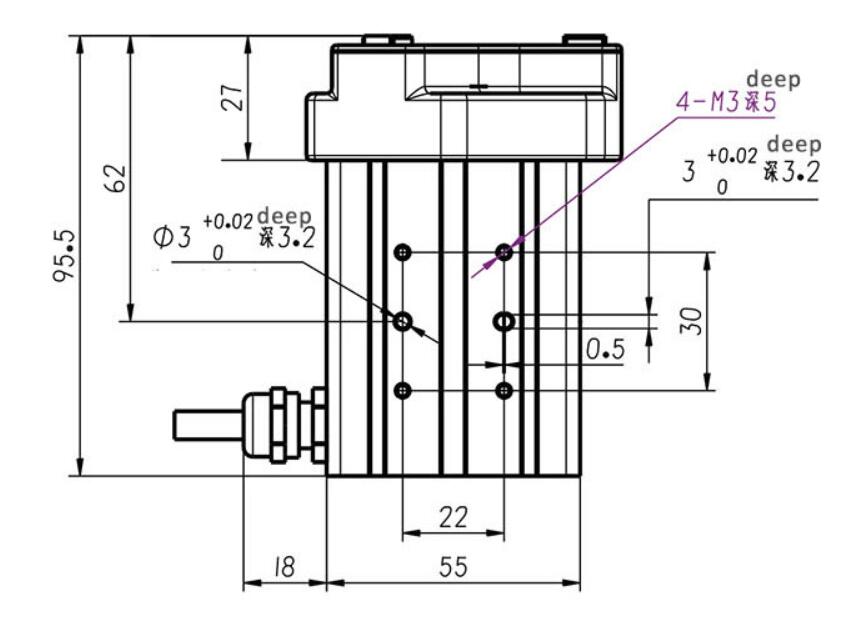
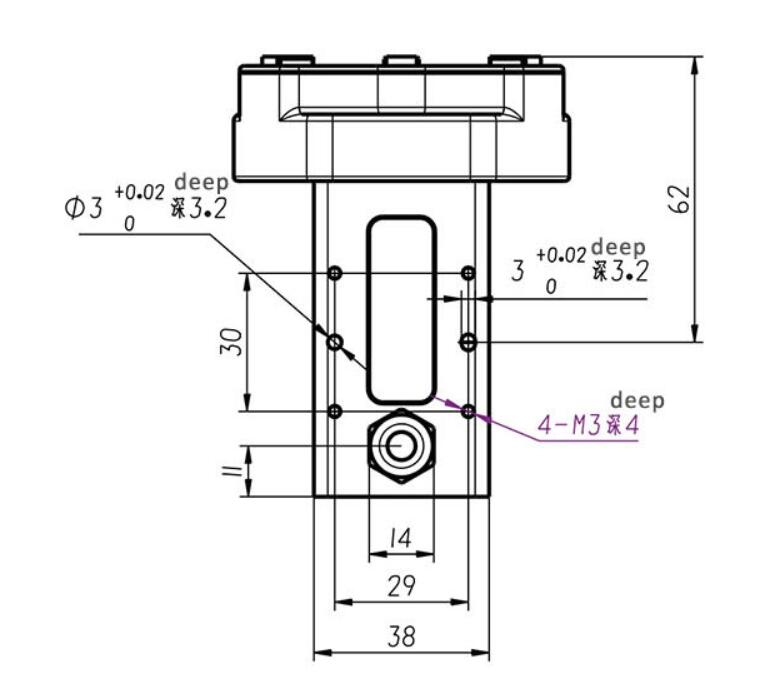
| มิติ(ล*ว*ฮ) | 73*73*95.5 มม. |
| ระดับการป้องกัน | ไอพี20 |
| ประเภทมอเตอร์ | มอเตอร์ไฟฟ้าเซอร์โว |
| กระแสสูงสุด | 0.6เอ |
| แรงดันไฟฟ้าที่กำหนด | 24V ±10% |
| กระแสไฟสแตนด์บาย | 0.3เอ |
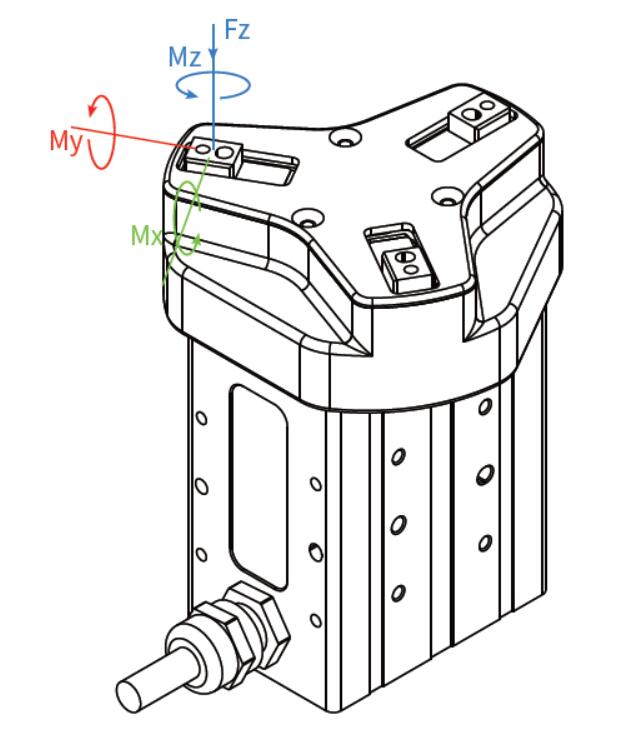
| น้ำหนักบรรทุกคงที่ที่อนุญาตในทิศทางแนวตั้ง | |
| เอฟซี: | 70N |
| แรงบิดที่อนุญาต | |
| มx: | 0.64 นิวตันเมตร |
| ของฉัน: | 0.4 นิวตันเมตร |
| มz: | 0.48 นิวตันเมตร |
ความแม่นยำในการกำหนดตำแหน่งด้วยเครื่องจับยึดสามนิ้ว
เครื่องจับยึดไฟฟ้าแบบสามนิ้ว Z-ECG-10 มีความแม่นยำในการทำซ้ำ ±0.03 มม. ใช้การจับยึดแบบสามนิ้ว และมีฟังก์ชันตรวจจับการหลุดของชิ้นงานขณะจับยึด และการส่งออกข้อมูลเฉพาะบริเวณ ซึ่งสามารถจับยึดวัตถุทรงกระบอกได้ดียิ่งขึ้น


ตัวควบคุมในตัว ผสานรวมได้สูง
มีระบบป้องกันการโอเวอร์โหลดที่ดีเยี่ยม ช่วยให้มั่นใจได้ว่าระบบจับยึดไฟฟ้าจะไม่หยุดทำงานหรือเกิดสถานการณ์ผิดปกติอื่นๆ มีตัวควบคุมในตัว สามารถควบคุมแรง ขนาดหัวจับ และความเร็วได้ ครอบคลุมพื้นที่ทำงานขนาดเล็ก ติดตั้งง่าย
ขนาดเล็ก ติดตั้งง่าย

Z-ECG-10 ใช้ระบบส่งกำลังแบบเฟืองและรางเลื่อน + รางนำเชิงเส้น มีขนาด L73*W73*H109 มม. น้ำหนักเพียง 0.65 กก. โครงสร้างกะทัดรัด รองรับการติดตั้งได้หลายรูปแบบ และง่ายต่อการทำงานหนีบยึดหลายประเภท


ตอบสนองฉับไว แม่นยำ ควบคุมกำลังได้
จังหวะการหนีบที่สั้นที่สุดคือ 0.3 วินาที แรงหนีบ 3-10 นิวตัน ระยะการหนีบ 10 มิลลิเมตร น้ำหนักประมาณ 0.2 กิโลกรัม ซึ่งสามารถหนีบชิ้นงานได้อย่างแม่นยำสูง
โหมดควบคุมหลากหลาย ใช้งานง่าย

Z-ECG-10 สามารถควบคุมได้อย่างแม่นยำด้วยระบบ Modbus ติดตั้งง่าย ใช้การสื่อสารแบบดิจิทัล I/O เพียงแค่ใช้สายเคเบิลเส้นเดียวในการเชื่อมต่อเปิด/ปิด และยังเข้ากันได้กับระบบควบคุมหลัก PLC อีกด้วย

การชดเชยจุดศูนย์ถ่วงของน้ำหนักบรรทุก
ธุรกิจของเรา







